tips: 关键点在于:FaellerVorrueckeFahrzeug -> childNodes -> Physical System -> childNodes -> FaellerVorrueckeFahrzeug (RBD) -> childNodes -> Interconnections (RBD - RBD) -> childNodes -> HingeJoint: Motorwagen_RBD <–> Mittelgelenk_RBD -> extension -> JointHinge: Motorwagen_RBD <–> Mittelgelenk_RBD set isLocked
HingeJoint(铰链):两刚体之间本来有 6 个相对自由度(DoF)。铰链会约束 5 个(3 个平移 + 2 个旋转),只留下 1 个旋转自由度,就是“绕铰轴转动”。
把铰链设为 Locked:把最后这 1 个旋转自由度也禁掉 → 变成 Fixed/Weld Joint(刚性焊接) 的效果。两边不能再发生任何相对运动。
通过断点调试,问题没有出现在代码里,就是因为一设 isLocked 引擎就会把原来的 Hinge 销毁并换成 Fixed/锁死版本,从而重建了刚体的 constraint 列表,形成了一个union。这个和你树里的关节矛盾,所以直接报错。你手里的旧容器/旧指针还在被迭代 → 元素越界/悬空;
我之前的用轮子判断也是崩溃的 所以判断是因为树里面的刚体和isLocked之后不符合
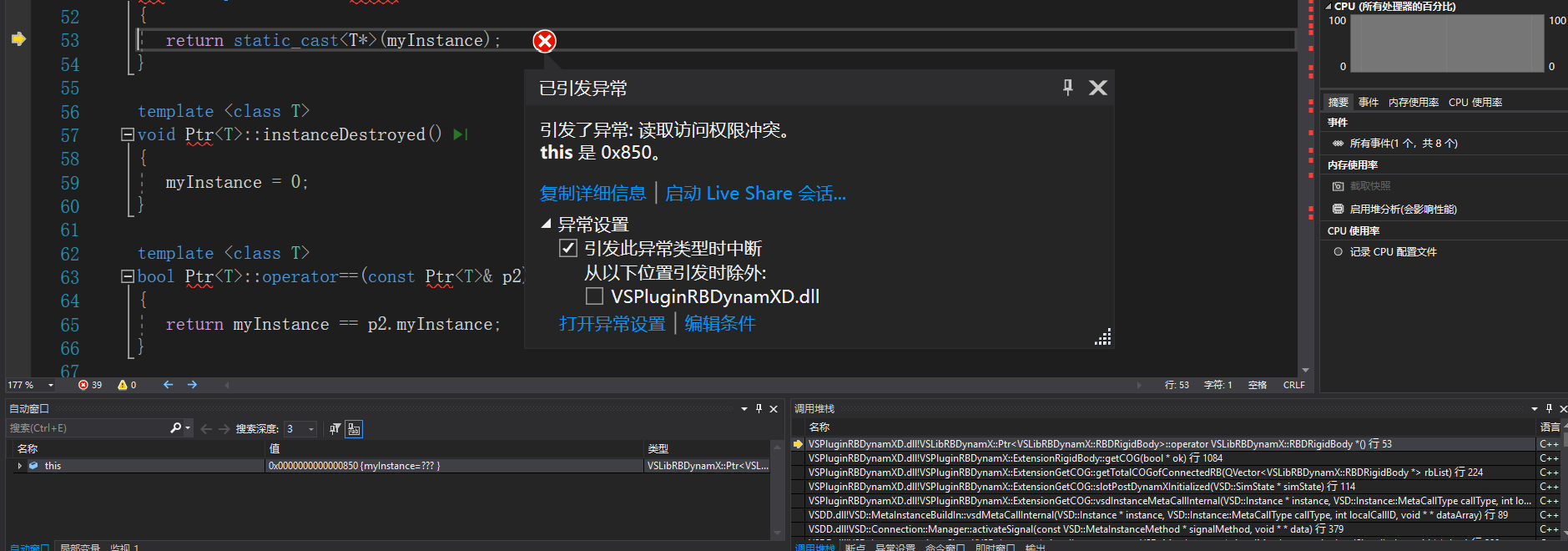
崩溃不是在你的 ExtensionCheckRollover 里,而是发生在 VSPluginRBDynamXD.dll 里的一个别的扩展——名字就写在栈上:
VSPluginRBDynamX::ExtensionGetCOG::slotPostDynamXInitialized(...)
→ VSPluginRBDynamX::ExtensionGetCOG::getTotalCOGofConnectedRB(...)
→ VSPluginRBDynamX::ExtensionRigidBody::getCOG(...)
→ VSLibRBDynamX::Ptr<...>::operator T*() // 这里炸,this = 0x850
一旦把关节设为 isLocked,引擎会把 Hinge 换成 Fixed/焊接,重建约束容器;凡是还拿着旧容器/旧元素去遍历的代码,都会在 Ptr::operator T*() 这种地方爆。
问题出现在外部ExtensionRigidBody::getCOG(),在ExtensionCheckRollover中的算的COG没有走到这一步呢。
定位问题:为什么一点isLocked就不进入我的代码的地方了。
9.22 定位形成一个union后,39个刚体变成38个了。
Union 刚体,而 Union 是场景临时生成的聚合节点,没有对应的 ExtensionRigidBody
[COG] ext=null for “Union_(Motorwagen_RBDRB_Motorwagen_(++)+Mittelgelenk_RBDRB_Mittelgelenk_(+))”
1. 静态稳定判据的力学基础(为什么用“COM 投影 ∈ 支撑域”)
- 车辆受到重力 $\mathbf{W}=m\mathbf{g}$。在准静态(或低速、加速度很小)下,支撑面(地面)上的接触力合力 $\mathbf{R}$ 会抵消重力:$\mathbf{R}+\mathbf{W}=\mathbf{0}$。
-
等效条件:若把 $\mathbf{W}$ 沿重力方向投到地面平面,记 COM(质心)在该平面上的投影点为 $\text{proj}(\mathrm{COM})$;则存在一组非负的接触支持力(轮-地法向力),使得其力矩合可与重力矩平衡的充要条件之一是
\[\text{proj}(\mathrm{COM}) \in \text{ground support polygon}.\]直观理解:支撑反力的“可行锥”包含了重力的反方向,且合力的“作用线”要能穿过支撑多边形内部。若投影跑出支撑域,多边支撑无法产生所需稳定力矩,系统绕临界边翻覆。
这就是经典的ZMP/支撑多边形思想在“静态/准静态”下的简化版本。
2. 我们在代码里做了哪些几何运算?
2.1 用重力定义“水平参考平面”
- 从仿真场景读到重力向量 $\mathbf{g}$(若异常为零,则兜底 $(0,0,-1)$)。
- 令平面法向 $\mathbf{n} = -\hat{\mathbf{g}} = -\mathbf{g}/|\mathbf{g}|$。
-
构造与 $\mathbf{n}$ 正交的二维正交基 $(\mathbf{u}, \mathbf{v})$:
- 取一个不与 $\mathbf{n}$ 平行的参考向量 $\mathbf{r}$(例如 $z$ 轴或 $y$ 轴),
- $\mathbf{u} = \frac{\mathbf{r}\times \mathbf{n}}{|\mathbf{r}\times \mathbf{n}|}$, $\mathbf{v} = \mathbf{n}\times \mathbf{u}$。
- 这个 $(\mathbf{u},\mathbf{v})$ 平面总是垂直于重力,天然适配斜坡、侧坡、起伏地形;不依赖“世界的固定水平”。
结论:无论地面怎么倾斜,只要重力方向正确,判据不受场景“坐标系水平与否”的影响。
2.2 支撑点与支撑域(AABB)
- 用碰撞对 $\text{currentPairs}$ 判断哪些轮胎着地,取这些轮胎节点世界位置 $\mathbf{P}_k$。
- 投影到 $(\mathbf{u},\mathbf{v})$: $p_{u,k}=\mathbf{P}k\cdot\mathbf{u}$, $p{v,k}=\mathbf{P}_k\cdot\mathbf{v}$。
- 取这些投影点的轴对齐最小包围盒(AABB): $[u_{\min},u_{\max}]\times[v_{\min},v_{\max}]$。
- 轻微向内“收缩”一个固定量 $s$(不超过最短边一半),得到收缩后的支撑盒,抑制“贴线抖动”。
注:AABB 是对真实支撑多边形(应取凸包)的保守近似,优点是计算超快;缺点是某些不规则接触分布时略保守。需要更严谨可把 AABB 换成凸包 + 点在多边形内测试。
3. 整车质心(COM)的计算与投影
-
选取“属于本车装配树”的所有非固定刚体 $i$,读取其质量 $m_i$ 与世界坐标 $\mathbf{x}_i$,算质量加权质心:
\[\mathrm{COM}=\frac{\sum_i m_i\mathbf{x}_i}{\sum_i m_i}.\] - 投到 $(\mathbf{u},\mathbf{v})$ 平面: $c_u=\mathrm{COM}\cdot\mathbf{u}$, $c_v=\mathrm{COM}\cdot\mathbf{v}$。
-
几何安全裕度(离支撑盒的最近边界距离):
\[d_u=\min(c_u-u_{\min},\,u_{\max}-c_u),\quad d_v=\min(c_v-v_{\min},\,v_{\max}-c_v),\] \[\text{margin}=\min(d_u,\,d_v).\]margin 为负表示投影跑出支撑盒。
重要:COM 的高度不影响此静态判据(投影只用水平坐标)。高度在动态翻覆(大加速度/俯仰/侧倾角速度时)会通过惯性项影响“等效力/力矩”,那是 ZMP/瞬时支撑力分布才需要考虑的内容(见 §6)。
4. 判定阈值、滞回与去抖(为什么能“止闪烁”)
- 记收缩后的支撑盒边长 $W_u=u_{\max}-u_{\min},\,W_v=v_{\max}-v_{\min}$,最短边 $W_\text{min}=\min(W_u,W_v)$。
-
我们定义两个阈值(单位米):
\[T_{\text{enter}}=\max(0.12,\,0.12\,W_\text{min}),\qquad T_{\text{exit}}=\max(0.18,\,0.18\,W_\text{min}).\]- 进入危险:$\text{margin}<T_{\text{enter}}$
- 退出危险:$\text{margin}>T_{\text{exit}}$ 这就是滞回(enter < exit),避免在临界附近来回跳。
-
连续帧去抖:
- 进入危险需要连续 $N_d$ 帧满足(默认 3)才置
true; - 解除危险需要连续 $N_s$ 帧满足(默认 5)才置
false; - 落在 $[T_{\text{enter}}, T_{\text{exit}}]$ 的“中立区”不改状态,同时清零计数器。
- 进入危险需要连续 $N_d$ 帧满足(默认 3)才置
- 预热
_warmup帧把状态锁在安全,避免初始化/暂停恢复时的瞬态抖动。
小推导:在水平地面、近似“矩形轮距×轴距”的车辆上,若 COM 水平偏移量达到半宽就会绕边翻。我们用 $12\%/18\%$ 的最短边比例(或绝对 $12/18$ cm)作为“危险/安全”阈值,既有尺度自适应,又能覆盖小车与大车。
5. 退化与极端情况的处理
- 若没有轮胎着地(ng=0):没有支撑点 ⇒ 必然失稳,判危险。
- 若 AABB 的某一维度 $\le 0$(或很小):意味着只有共线或单点支撑,稳定裕度逼近 0,按危险处理(或提前进入中立/危险,视策略)。
6. 适用边界与扩展(何时足够,何时需要“更物理”)
什么时候足够?
- 低速、慢变(越野缓慢爬坡、侧坡行驶、缓慢转向、吊臂缓慢摆动…)。
- 你只需要一个**“是否已翻/将翻”的稳健**开关,抗噪、不卡顿、易调。
什么时候需要更物理(ZMP/惯性力)?
- 急加速/急刹/急转弯时,惯性力 $\mathbf{F}\text{inert}=m\mathbf{a}$ 的投影与重力合成一个等效负载,它的作用线(或 ZMP)相对支撑域的位置才是严格判据。 简化可把 $\mathbf{g}$ 换成“等效重力” $\mathbf{g}\text{eff}=\mathbf{g}-\mathbf{a}$(非严格,但工程上常这么做),或直接从接触求和反力算 ZMP。
- 大角速度引起的陀螺/离心效应,或高 COM 急摆动的动力学力矩,都超出静态判据,需要动力学层的 ZMP/反力矩计算。
7. 若要从 AABB 升级到“凸包判定”
- 算支撑点的凸包(如 Andrew/Graham 扫描);
- 再做点在凸多边形内测试(射线法/叉积同侧法);
- margin 可替换为到凸包边的最小距离;
- 其它流程(滞回/去抖)保持不变。
- 这样在非矩形/不规则着地分布时更精确,但计算稍重。
8. 典型应用场景的“脑补图”和调参建议
- 侧坡行驶:$\mathbf{n}=-\hat{\mathbf{g}}$ 自动随坡面;COM 投影向坡低侧移动,margin 变小;当 < $T_{\text{enter}}$ 连续若干帧 ⇒ 报警。
- 越野砾石/台阶:支撑点可能只剩对角两轮,AABB 变窄;阈值自动收紧(按最短边比例)。必要时增大
wantShrink到 $0.07\sim0.10$ m。 - 急转弯(动态):静态判据会滞后(有时晚于真正极限)。若想提前量,保留此算法但适当增大
enterTh(比如 15%/0.15m),或引入 $\mathbf{g}_\text{eff}$。 - 暂停→继续:开
_warmup=5~10帧;needDangerFrames=3、needSafeFrames=5~7比较稳。 - 高噪场景(传感/接触对频繁变化):加大
wantShrink与needSafeFrames,并适度调高exitTh。
9. 小结(拿来即用的理解)
- 核心判据:把整车 COM投影到重力正交平面,看它是否位于支撑域内并留有裕度。
- 工程增强:AABB 近似 + 向内收缩 + 滞回 + 连续帧去抖 + 预热。
- 适用范围:静态/准静态稳健判覆;在强动态时可替换重力为等效重力或上升到 ZMP 级别。
这份逻辑跟你现有代码 1:1 对应,方便以后查式子/改参数/换支撑域实现(AABB→凸包)。