删除/解耦impulsebased求解器
-
RBDScene.cpp
#include "./RBDColliderGroup.h" #include "./RBDClusterLagrangeMultipliers.h" //#include "./RBDClusterImpulseBased.h" #include "./RBDClusterPenalty.h" #include "../RBDClusterSequentialImpulse.h"const CONSTRAINTSOLVERTYPE t = this->constraintSolverType(); //if (t == CST_IMPULSEBASED) //{ //return new RBDClusterImpulseBased(this); //} else if (t == CST_PENALTY) { return new RBDClusterPenalty(this); } //(ci) use the attached LagrangeDebugObserver else if (myLDOPtr) { return new RBDClusterLagrangeMultipliers(this, myLDOPtr); } -
RBDScene.h
enum CONSTRAINTSOLVERTYPE { CST_LAGRANGEDANTZIG, CST_LAGRANGEGS, CST_LAGRANGEAUTO, //CST_IMPULSEBASED, CST_PENALTY, CST_SEQUENTIALIMPULSE }; -
VSPluginRBDynamXMainSimStateExtension.cpp
else if (solverName.toLower() == "penalty") { myRBDScene->setConstraintSolverType(VSLibRBDynamX::RBDScene::CST_PENALTY); } /*else if (solverName.toLower() == "impulsebased") { myRBDScene->setConstraintSolverType(VSLibRBDynamX::RBDScene::CST_IMPULSEBASED); }*/ else if (solverName.toLower() == "sequentialimpulse") { myRBDScene->setConstraintSolverType(VSLibRBDynamX::RBDScene::CST_SEQUENTIALIMPULSE); } else -
VSPluginRBDynamXOptions.cpp
constraintSolverValues.append(VSLibGUI::SettingsWrapper::ComboBox::Pair("lagrangeauto", tr("Lagrange Multipliers, Auto")));
constraintSolverValues.append(VSLibGUI::SettingsWrapper::ComboBox::Pair("lagrangedantzig", tr("Lagrange Multipliers, Dantzig")));
constraintSolverValues.append(VSLibGUI::SettingsWrapper::ComboBox::Pair("lagrangegs", tr("Lagrange Multipliers, Projected Gauss-Seidel")));
// constraintSolverValues.append(VSLibGUI::SettingsWrapper::ComboBox::Pair("impulsebased",
// tr("Impulsbasiert, Iterativ")));
constraintSolverValues.append(VSLibGUI::SettingsWrapper::ComboBox::Pair("penalty", tr("Penalty")));
constraintSolverValues.append(VSLibGUI::SettingsWrapper::ComboBox::Pair("sequentialimpulse", tr("Sequential Impulse, Projected Gauss-Seidel")));
最后要删除pro文件清除Cmake
测试模型为:MCORE_mixerNSC,并作了一些修改以适配串行
并行代码:
// =============================================================================
// PROJECT CHRONO - http://projectchrono.org
//
// Copyright (c) 2014 projectchrono.org
// All rights reserved.
//
// Use of this source code is governed by a BSD-style license that can be found
// in the LICENSE file at the top level of the distribution and at
// http://projectchrono.org/license-chrono.txt.
//
// =============================================================================
// Authors: Radu Serban, Hammad Mazhar
// =============================================================================
//
// Chrono::Multicore test program using penalty method for frictional contact.
//
// The model simulated here consists of a number of spherical objects falling
// onto a mixer blade attached through a revolute joint to the ground.
//
// The global reference frame has Z up.
// =============================================================================
#include <cstdio>
#include <vector>
#include <cmath>
#include "chrono_multicore/physics/ChSystemMulticore.h"
#include "chrono/ChConfig.h"
#include "chrono/physics/ChBodyEasy.h"
#include "chrono/physics/ChLinkMotorRotationAngle.h"
#include "chrono/utils/ChUtilsCreators.h"
#include "chrono/utils/ChUtilsInputOutput.h"
#include "chrono/assets/ChVisualSystem.h"
#ifdef CHRONO_VSG
#include "chrono_vsg/ChVisualSystemVSG.h"
using namespace chrono::vsg3d;
#endif
using namespace chrono;
// -----------------------------------------------------------------------------
// Create a bin consisting of five boxes attached to the ground and a mixer
// blade attached through a revolute joint to ground. The mixer is constrained
// to rotate at constant angular velocity.
// -----------------------------------------------------------------------------
std::shared_ptr<ChBody> AddContainer(ChSystemMulticoreNSC* sys) {
// Create a common material
auto mat = chrono_types::make_shared<ChContactMaterialNSC>();
mat->SetFriction(0.4f);
// Create the containing bin (2 x 2 x 1)
auto bin = chrono_types::make_shared<ChBody>();
bin->SetMass(100);
bin->SetPos(ChVector3d(0, 0, 0));
bin->SetRot(ChQuaternion<>(1, 0, 0, 0));
bin->EnableCollision(true);
bin->SetFixed(true);
utils::AddBoxContainer(bin, mat, //
ChFrame<>(ChVector3d(0, 0, 0.5), QUNIT), //
ChVector3d(2, 2, 1), 0.2, //
ChVector3i(2, 2, -1));
bin->GetCollisionModel()->SetFamily(1);
bin->GetCollisionModel()->DisallowCollisionsWith(2);
sys->AddBody(bin);
// The rotating mixer body (1.6 x 0.2 x 0.4)
auto mixer = chrono_types::make_shared<ChBody>();
mixer->SetMass(10.0);
mixer->SetInertiaXX(ChVector3d(50, 50, 50));
mixer->SetPos(ChVector3d(0, 0, 0.205));
mixer->SetFixed(false);
mixer->EnableCollision(true);
ChVector3d hsize(0.8, 0.1, 0.2);
utils::AddBoxGeometry(mixer.get(), mat, hsize);
mixer->GetCollisionModel()->SetFamily(2);
sys->AddBody(mixer);
// Create a motor between the two bodies, constrained to rotate at 90 deg/s
auto motor = chrono_types::make_shared<ChLinkMotorRotationAngle>();
motor->Initialize(mixer, bin, ChFrame<>(ChVector3d(0, 0, 0), ChQuaternion<>(1, 0, 0, 0)));
motor->SetAngleFunction(chrono_types::make_shared<ChFunctionRamp>(0, CH_PI / 2));
sys->AddLink(motor);
return mixer;
}
// -----------------------------------------------------------------------------
// Create the falling spherical objects in a uniform rectangular grid.
// -----------------------------------------------------------------------------
void AddFallingBalls(ChSystemMulticore* sys) {
// Shared contact materials
auto ball_mat = chrono_types::make_shared<ChContactMaterialNSC>();
ball_mat->SetFriction(0.4f);
ball_mat->SetRestitution(0.5f);
auto cyl_mat = chrono_types::make_shared<ChContactMaterialNSC>();
// Create the falling objects
for (int ix = -2; ix < 3; ix++) {
for (int iy = -2; iy < 3; iy++) {
ChVector3d b_pos(0.4 * ix, 0.4 * iy, 1);
ChVector3d c_pos(0.4 * ix, 0.4 * iy, 1.4);
auto ball = chrono_types::make_shared<ChBodyEasySphere>(0.1, 2000, ball_mat);
ball->SetPos(b_pos);
sys->AddBody(ball);
auto cyl = chrono_types::make_shared<ChBodyEasyCylinder>(ChAxis::Y, 0.1, 0.1, 2000, cyl_mat);
cyl->SetPos(c_pos);
sys->AddBody(cyl);
}
}
}
// -----------------------------------------------------------------------------
// Create the system, specify simulation parameters, and run simulation loop.
// -----------------------------------------------------------------------------
int main(int argc, char* argv[]) {
std::cout << "Copyright (c) 2017 projectchrono.org\nChrono version: " << CHRONO_VERSION << std::endl;
// Simulation parameters
// ---------------------
double gravity = 9.81;
double time_step = 1e-3;
uint max_iteration = 30;
real tolerance = 1e-3;
// Create system
// -------------
ChSystemMulticoreNSC sys;
// Set number of threads
sys.SetNumThreads(8);
// Set associated collision detection system
sys.SetCollisionSystemType(ChCollisionSystem::Type::MULTICORE);
// Set gravitational acceleration
sys.SetGravitationalAcceleration(ChVector3d(0, 0, -gravity));
// Set solver parameters
sys.GetSettings()->solver.solver_mode = SolverMode::SLIDING;
sys.GetSettings()->solver.max_iteration_normal = max_iteration / 3;
sys.GetSettings()->solver.max_iteration_sliding = max_iteration / 3;
sys.GetSettings()->solver.max_iteration_spinning = 0;
sys.GetSettings()->solver.max_iteration_bilateral = max_iteration / 3;
sys.GetSettings()->solver.tolerance = tolerance;
sys.GetSettings()->solver.alpha = 0;
sys.GetSettings()->solver.contact_recovery_speed = 10000;
sys.ChangeSolverType(SolverType::APGD);
sys.GetSettings()->collision.narrowphase_algorithm = ChNarrowphase::Algorithm::HYBRID;
sys.GetSettings()->collision.collision_envelope = 0.01;
sys.GetSettings()->collision.bins_per_axis = vec3(10, 10, 10);
// Enable active bounding box
////sys.GetSettings()->collision.use_aabb_active = true;
////sys.GetSettings()->collision.aabb_min = real3(-1, -1, -1.5);
////sys.GetSettings()->collision.aabb_max = real3(+1, +1, +1.5);
// Create the fixed and moving bodies
// ----------------------------------
auto mixer = AddContainer(&sys);
AddFallingBalls(&sys);
// Perform the simulation
// ----------------------
#ifdef CHRONO_VSG
auto vis = chrono_types::make_shared<ChVisualSystemVSG>();
vis->AttachSystem(&sys);
vis->SetWindowTitle("Mixer NSC");
vis->SetCameraVertical(CameraVerticalDir::Y);
vis->AddCamera(ChVector3d(0.6, -2, 3), ChVector3d(0, 0, 0));
vis->SetWindowSize(1280, 720);
vis->SetBackgroundColor(ChColor(0.8f, 0.85f, 0.9f));
vis->EnableSkyBox();
vis->SetCameraAngleDeg(40.0);
vis->SetLightIntensity(0.75f);
vis->SetLightDirection(1.5 * CH_PI_2, CH_PI / 6);
vis->EnableShadows();
vis->Initialize();
while (vis->Run()) {
sys.DoStepDynamics(time_step);
vis->Render();
////auto frc = mixer->GetAppliedForce();
////auto trq = mixer->GetAppliedTorque();
////std::cout << sys.GetChTime() << " force: " << frc << " torque: " << trq << std::endl;
}
#else
// Run simulation for specified time
double time_end = 1;
int num_steps = (int)std::ceil(time_end / time_step);
double time = 0;
for (int i = 0; i < num_steps; i++) {
sys.DoStepDynamics(time_step);
time += time_step;
}
#endif
return 0;
}
所以需要比较的是RTF
Real Time Factor (RTF): 墙钟时间 / 本帧推进的仿真时间 > 1 表示比实时慢(算 1s 仿真,要花 >1s 墙钟);< 1 表示比实时快。
chrono需要自己手动设置线程
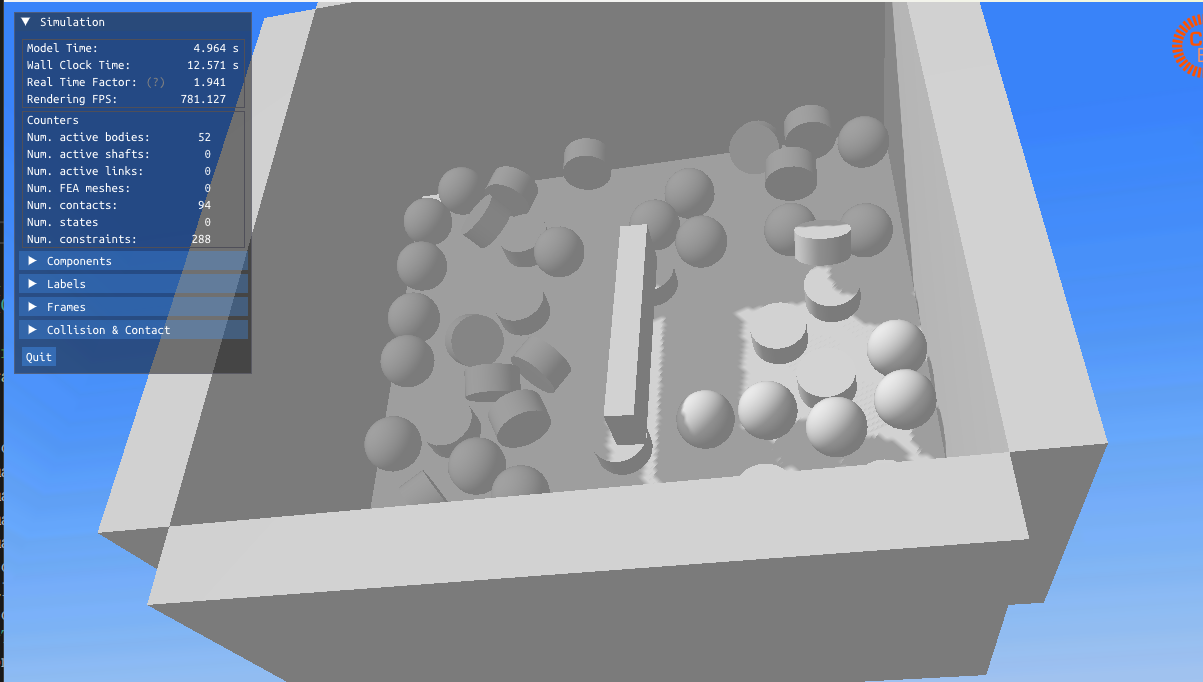
16线程
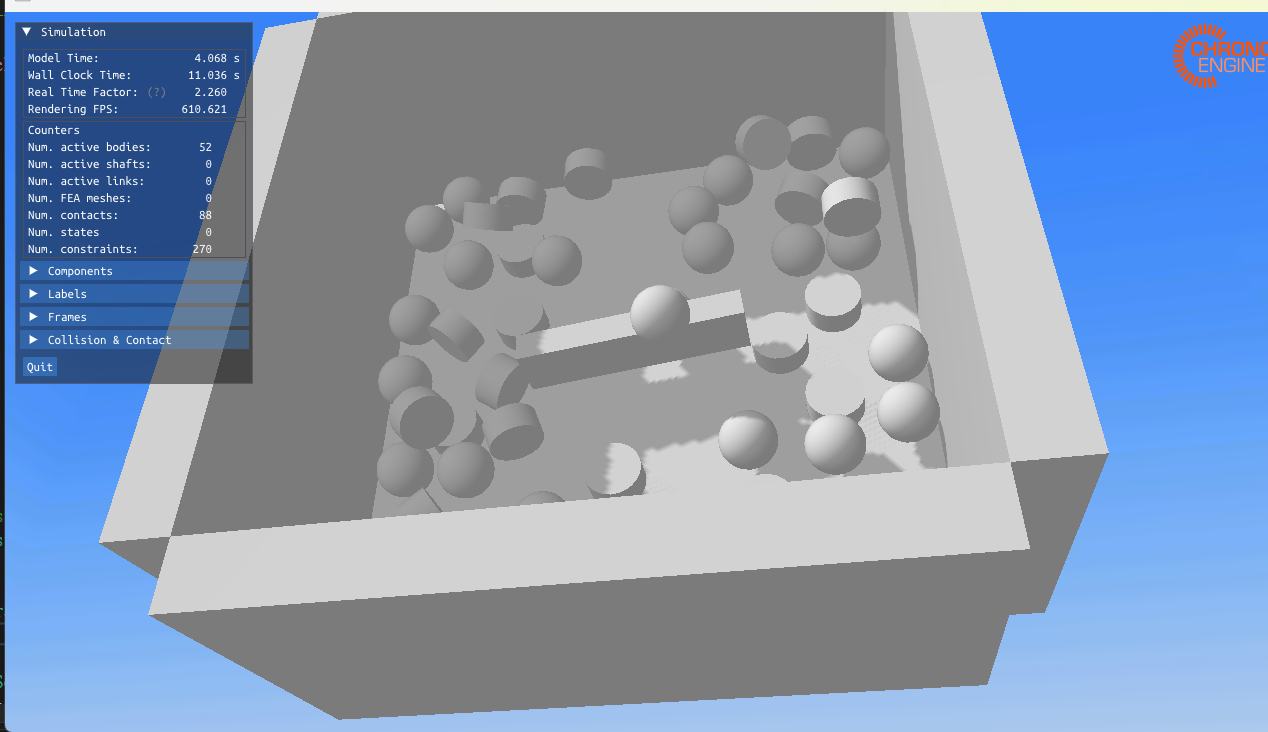
我们可以看到RTF的值主要在2.4左右
8线程
经过测量大部分时间,RTF的值维持在1.8左右
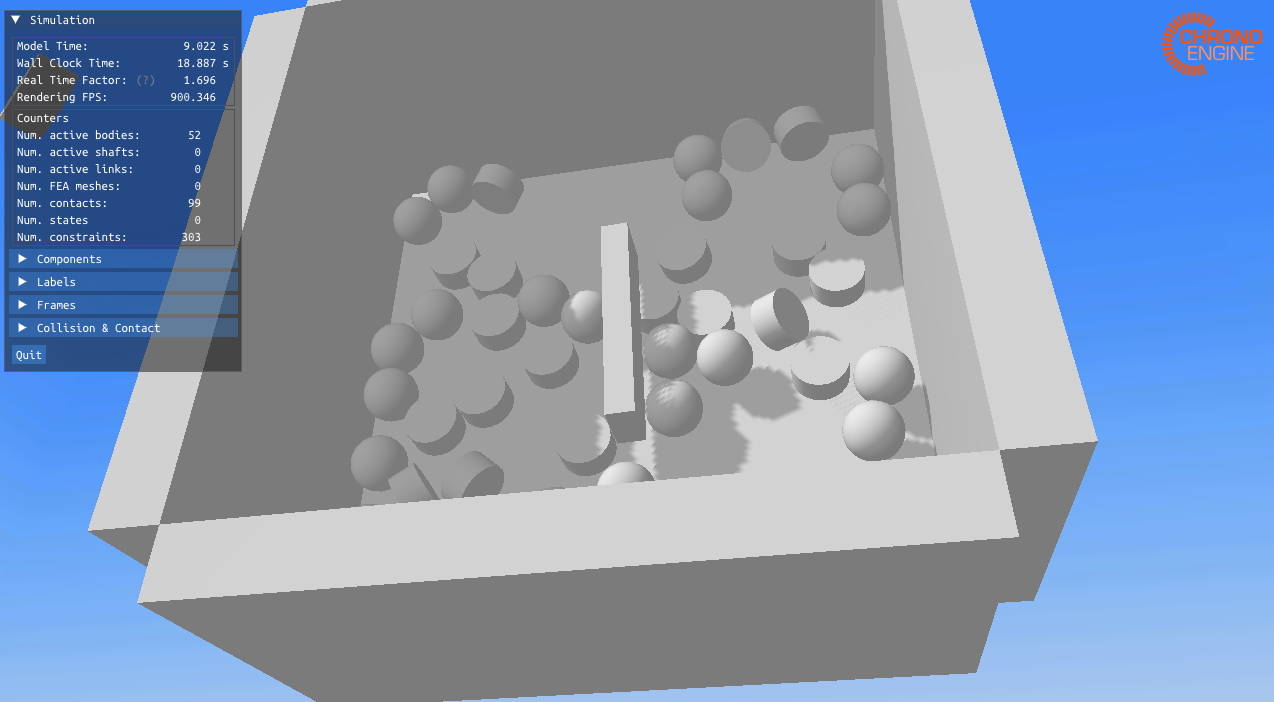
1线程:
RTF的值维持在1.8左右,单线程和8线程差距不明显,可能是模型中物体数量不多的原因。
128线程:
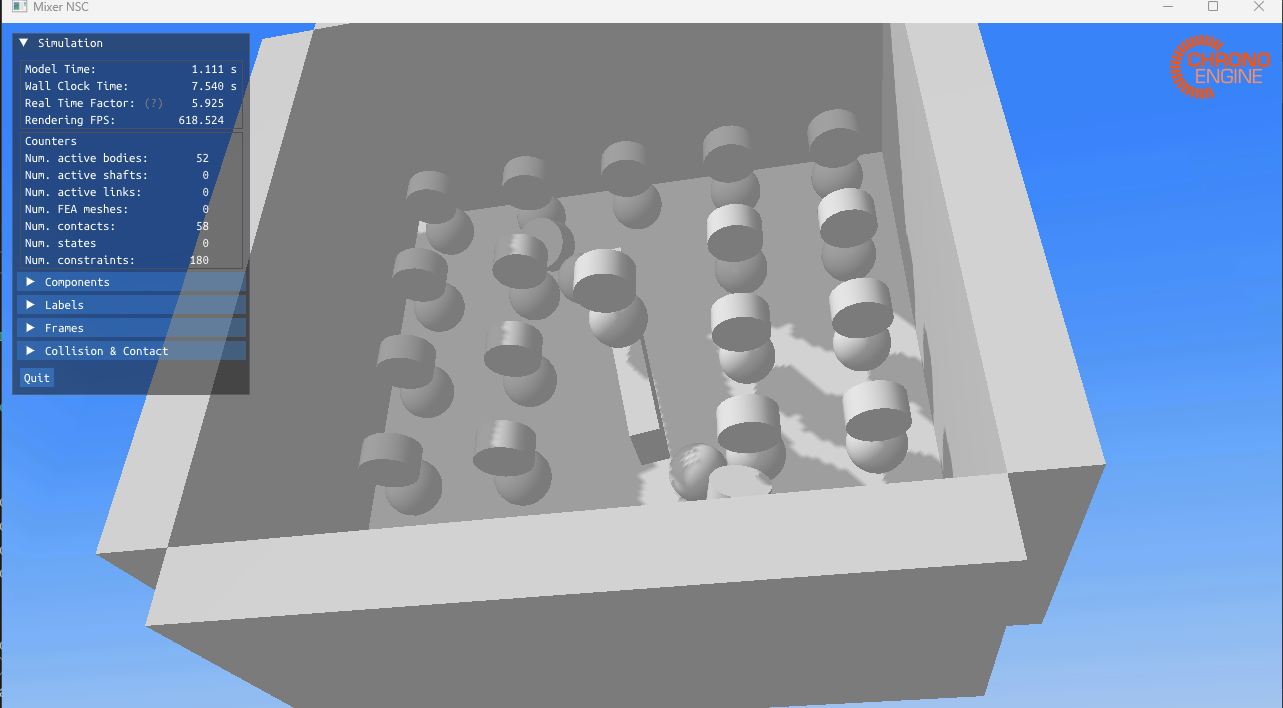
RTF的值已经接近6.5,说明过量的线程已经影响了运行效果。
串行效果:
代码:
// =============================================================================
// PROJECT CHRONO - http://projectchrono.org
// =============================================================================
//
// 传统串行(ChSystemNSC)版本:与原多核示例的几何/材料/电机完全一致
// - 碰撞:BULLET
// - 求解器:ChSolverAPGD
//
// =============================================================================
#include <cstdio>
#include <vector>
#include <cmath>
#include <memory>
#include "chrono/ChConfig.h"
#include "chrono/physics/ChSystemNSC.h" // 串行系统
#include "chrono/solver/ChSolverAPGD.h" // 串行 APGD 求解器
#include "chrono/collision/ChCollisionModel.h" // 可选:默认包络/边距
#include "chrono/physics/ChBodyEasy.h"
#include "chrono/physics/ChLinkMotorRotationAngle.h"
#include "chrono/utils/ChUtilsCreators.h"
#include "chrono/utils/ChUtilsInputOutput.h"
#include "chrono/assets/ChVisualSystem.h"
#ifdef CHRONO_VSG
#include "chrono_vsg/ChVisualSystemVSG.h"
using namespace chrono::vsg3d;
#endif
using namespace chrono;
// -----------------------------------------------------------------------------
// Create a bin consisting of five boxes attached to the ground and a mixer
// blade attached through a revolute joint to ground. The mixer is constrained
// to rotate at constant angular velocity.
// -----------------------------------------------------------------------------
// ⚠️ 改动:参数从 ChSystemMulticoreNSC* -> ChSystem*,其余建模保持一致
std::shared_ptr<ChBody> AddContainer(ChSystem* sys) {
// Create a common material
auto mat = chrono_types::make_shared<ChContactMaterialNSC>();
mat->SetFriction(0.4f);
// Create the containing bin (2 x 2 x 1)
auto bin = chrono_types::make_shared<ChBody>();
bin->SetMass(100);
bin->SetPos(ChVector3d(0, 0, 0));
bin->SetRot(ChQuaternion<>(1, 0, 0, 0));
bin->EnableCollision(true);
bin->SetFixed(true);
utils::AddBoxContainer(bin, mat, //
ChFrame<>(ChVector3d(0, 0, 0.5), QUNIT), //
ChVector3d(2, 2, 1), 0.2, //
ChVector3i(2, 2, -1));
bin->GetCollisionModel()->SetFamily(1);
bin->GetCollisionModel()->DisallowCollisionsWith(2);
sys->AddBody(bin);
// The rotating mixer body (1.6 x 0.2 x 0.4)
auto mixer = chrono_types::make_shared<ChBody>();
mixer->SetMass(10.0);
mixer->SetInertiaXX(ChVector3d(50, 50, 50));
mixer->SetPos(ChVector3d(0, 0, 0.205));
mixer->SetFixed(false);
mixer->EnableCollision(true);
ChVector3d hsize(0.8, 0.1, 0.2);
utils::AddBoxGeometry(mixer.get(), mat, hsize);
mixer->GetCollisionModel()->SetFamily(2);
sys->AddBody(mixer);
// Create a motor between the two bodies, constrained to rotate at 90 deg/s
auto motor = chrono_types::make_shared<ChLinkMotorRotationAngle>();
motor->Initialize(mixer, bin, ChFrame<>(ChVector3d(0, 0, 0), ChQuaternion<>(1, 0, 0, 0)));
motor->SetAngleFunction(chrono_types::make_shared<ChFunctionRamp>(0, CH_PI / 2));
sys->AddLink(motor);
return mixer;
}
// -----------------------------------------------------------------------------
// Create the falling spherical objects in a uniform rectangular grid.
// -----------------------------------------------------------------------------
// ⚠️ 改动:参数从 ChSystemMulticore* -> ChSystem*
void AddFallingBalls(ChSystem* sys) {
// Shared contact materials
auto ball_mat = chrono_types::make_shared<ChContactMaterialNSC>();
ball_mat->SetFriction(0.4f);
ball_mat->SetRestitution(0.5f);
auto cyl_mat = chrono_types::make_shared<ChContactMaterialNSC>();
// Create the falling objects(保持原来 5x5 布局与尺寸)
for (int ix = -2; ix < 3; ix++) {
for (int iy = -2; iy < 3; iy++) {
ChVector3d b_pos(0.4 * ix, 0.4 * iy, 1);
ChVector3d c_pos(0.4 * ix, 0.4 * iy, 1.4);
auto ball = chrono_types::make_shared<ChBodyEasySphere>(0.1, 2000, ball_mat);
ball->SetPos(b_pos);
sys->AddBody(ball);
auto cyl = chrono_types::make_shared<ChBodyEasyCylinder>(ChAxis::Y, 0.1, 0.1, 2000, cyl_mat);
cyl->SetPos(c_pos);
sys->AddBody(cyl);
}
}
}
// -----------------------------------------------------------------------------
// Main
// -----------------------------------------------------------------------------
int main(int argc, char* argv[]) {
std::cout << "Copyright (c) 2017 projectchrono.org\nChrono version: " << CHRONO_VERSION << std::endl;
// Simulation parameters(保持不变)
double gravity = 9.81;
double time_step = 1e-3;
unsigned int max_iteration = 30;
double tolerance = 1e-3;
// ==== 串行系统 ====
ChSystemNSC sys;
// 显式选择 Bullet 碰撞(串行后端)
sys.SetCollisionSystemType(ChCollisionSystem::Type::BULLET);
// 可选:设定默认碰撞包络/边距(与多核示例里的 envelope 概念对应)
// 取较小值以减少穿透数值误差;不想动就注释掉
ChCollisionModel::SetDefaultSuggestedEnvelope(0.002);
ChCollisionModel::SetDefaultSuggestedMargin(0.001);
// 重力
sys.SetGravitationalAcceleration(ChVector3d(0, 0, -gravity));
// 串行 APGD 求解器(替代原来的 APGD/APGDREF 多核设置)
auto solver = chrono_types::make_shared<ChSolverAPGD>();
solver->SetMaxIterations((int)max_iteration);
solver->SetTolerance(tolerance);
solver->EnableWarmStart(true);
sys.SetSolver(solver);
// 建模(保持与原来一致)
auto mixer = AddContainer(&sys);
AddFallingBalls(&sys);
// 运行
#ifdef CHRONO_VSG
auto vis = chrono_types::make_shared<ChVisualSystemVSG>();
vis->AttachSystem(&sys);
vis->SetWindowTitle("Mixer NSC (Serial)");
vis->SetCameraVertical(CameraVerticalDir::Y);
vis->AddCamera(ChVector3d(0.6, -2, 3), ChVector3d(0, 0, 0));
vis->SetWindowSize(1280, 720);
vis->SetBackgroundColor(ChColor(0.8f, 0.85f, 0.9f));
vis->EnableSkyBox();
vis->SetCameraAngleDeg(40.0);
vis->SetLightIntensity(0.75f);
vis->SetLightDirection(1.5 * CH_PI_2, CH_PI / 6);
vis->EnableShadows();
vis->Initialize();
while (vis->Run()) {
sys.DoStepDynamics(time_step);
vis->Render();
////auto frc = mixer->GetAppliedForce();
////auto trq = mixer->GetAppliedTorque();
////std::cout << sys.GetChTime() << " force: " << frc << " torque: " << trq << std::endl;
}
#else
double time_end = 1;
int num_steps = (int)std::ceil(time_end / time_step);
for (int i = 0; i < num_steps; i++) {
sys.DoStepDynamics(time_step);
}
#endif
return 0;
}
串行效果:
综合下来RTF在5左右,并且该值起伏很剧烈,在大到20小到3,不是很稳定,所以并行效果还是不错的,并且Chrono还进行了GPU的设置,对于超过属于万计的刚体是效果应该是比JOLT要好的,接下来进行jolt的测试。
问题是???jolt怎么测试,怎么比较两个的性能???
目前几乎没有“Jolt vs Chrono”一对一的官方横评??
留作思考吧。