总结
同样APGD也不需要使用大矩阵Z;只用过便宜,也就是编号,做乘子计算。
对于ChSystemDescriptor,也就是说,chrono中的建模阶段是通过对不同块的矩阵进行偏移,也就是编码,然后不组装大矩阵Z,看求解器需要不,如果是直接线性求解器,类比VEROSIM中的dantzig,那么我就按照编号把大矩阵组装好,然后进行线性的求解,但是对于APGD这种迭代的求解器暂时不需要大矩阵,那么他在APGD调用相关数据时,比如N和R时,就可以根据偏移编码,读取出数据,从而进行计算,怎么编写的目的是为“既能装配、也能算子式”的通用接口层,方便不同类型求解器插拔。
为什么要matrix-free(矩阵-自由)?
- 避内存 & 避装配成本:大问题(尤其是接触/摩擦)里,显式组装 𝑍的内存会爆;而且每一步接触图都在变,重装配又贵。用算子能省掉海量内存与装配时间
- 适配动态拓扑 :接触约束的稀疏结构随时间剧烈变化。matrix-free 不依赖固定稀疏图,天然适合“每步都变形”的系统(NSC/碰撞、关节开闭等)。
关于并行化:是在ChSystemMulticore完成的,扁平数组(SoA)+ 并行 kernel(openMP)?这部分之后求解。 matrix-free不绝对是为并行化做准备的。真正把并行吃满的,是 SoA 扁平数组 + 批量 kernel + 颜色/分块避免写冲突(Chrono Multicore 那套)。
算子相对来说更快但是不绝对,主要是出于缓存的考量。
更多的是为了节约缓存
关于ChSystemMulticore是怎么设计完成并行的的,我觉得可以作为后面学习的重点。
关于里面的投影部分,执行约束乘子的投影:将约束的拉格朗日乘子投影到允许的集合上(例如,双边约束不会改变乘子;而对摩擦约束,会把乘子投影到摩擦圆锥上)在CHCONSTRAINT中定义了结构体用来定义Constraint mode,如果时FRICTION选择,ccp投影摩擦锥。
ChConstraintTwoTuplesContactN<Ta,Tb>:法向(Normal, N)约束行
ChConstraintTwoTuplesFrictionT<Ta,Tb>:切向(Tangential, T)约束行(U 与 V 两条)
Simulation system
ChSystem 与两种系统
- ChSystemNSC(Non-Smooth Contacts, DVI/硬接触):接触约束走互补问题(LCP/VI),可用较大步长、效率高。
- ChSystemSMC(SMooth Contacts, 软接触/罚函数):接触可变形,常与弹簧-阻尼模型、FEA耦合。
Time steppers(时间积分器)
-
EULER_IMPLICIT_LINEARIZED(默认)
- 一阶、无内迭代、快;支持 DVI(硬接触);FEA 给一阶精度;约束靠稳定化。
-
HHT
- 隐式、有内迭代、二阶、可调数值阻尼;目前不能用于 DVI 硬接触;适合 FEA/SMC;约束因内迭代收敛“闭合得更严”。
-
NEWMARK
- 与 HHT 类似;除“梯形法则”特参外整体是一阶;多用于 FEA/SMC。
经验:DVI/硬接触 ⇒ EULER_IMPLICIT_LINEARIZED;软接触/FEA/需要二阶与阻尼 ⇒ HHT/NEWMARK。
Solvers(求解器)★重点
时间积分器每步都会调用“求解器”来求未知的加速度与反力。它往往是计算热点。
推荐的迭代求解器与特性:
-
PSOR
- 最常见入门选择;实现简单、收敛精度偏低,质量比奇怪时易卡;
- 支持 DVI/硬接触;
- 适合小规模、精度要求不高的场景。
-
APGD(加速投影梯度)
- 收敛好,高精度仿真常用;支持 DVI/硬接触;
- 对大问题更稳健,建议优先于 PSOR。
-
BARZILAIBORWEIN(BB) (后期是否考虑?)
- 收敛也不错;支持 DVI/硬接触;
- 与 APGD 相近,有时在大质量比下更鲁棒。
-
MINRES
- 适合 FEA;当前不支持 DVI/硬接触;
- 配合对称稀疏线性系统,常与预条件配合使用。
-
ADMM + PardisoMKL
- 同时支持 FEA 与 DVI;
- 需要内部线性解算器,最佳是 PardisoMKL(需单独模块),否则退化到 ChSolverSparseQR。
chrono 求解器结构
代码
ChVersion : 版本号头文件”(version header)
Chplatform: Chrono 的“跨平台胶水” ,ChApiEXPORT/IMPORT 解决不同平台/构建方式下动态库符号可见性问题;CH_DEPRECATED 用于标记弃用 API并在编译期发出友好提醒。
ChApiCE: ChApi 是一个“可见性贴纸”宏——你把它贴在要对外公开的类/函数前面,它会在编库时展开成“导出符号”,在用库时展开成“导入符号”;如果是静态库或非 Windows,它通常什么也不做。
ChClassFactory:工厂机制
ChSystemDescriptor:
-
CH_FACTORY_REGISTER(ChSystemDescriptor):注册进 Chrono 的类工厂(ClassFactory)这个类能被按名字动态创建/持久化;
-
CH_SPINLOCK_HASHSIZE:并发用的自旋锁分片大小;
-
ChSystemDescriptor() and ~ChSystemDescriptor():构造/析构把计数/参数复位、容器清空,但不负责删除外部对象。
-
ComputeFeasabilityViolation: 扫一遍所有约束,统计“最坏的违反量”和“(单边)互补残差的最坏值”,用于判断这一仿真步的约束是否“解干净了”。
-
CountActiveVariables and CountActiveConstraints:“统计 + 编号(写偏移)”的工具,用来把当前步中激活的变量/约束映射到全局向量里的正确位置。
-
UpdateCountsAndOffsets : 一次性刷新“计数 + 偏移”并开启缓存。
-
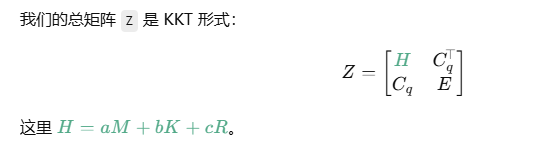
PasteMassKRMMatrixInto:把变量侧的大块 𝐻(质量/刚度/阻尼的组合)贴到全局稀疏矩阵 Z 的指定位置。 如图所示:
 。
。 -
PasteConstraintsJacobianMatrixInto and PasteConstraintsJacobianMatrixTransposedInto: 把雅可比和雅可比转置贴到全局稀疏矩阵。
-
PasteComplianceMatrixInto : 约束顺应矩阵(compliance matrix)E贴到一个稀疏大矩阵 Z 的指定位置。
-
BuildSystemMatrix:一次线性化方程组装成“整块稀疏矩阵 Z 和右端向量 rhs”
-
BuildFbVector: 按活跃变量(刚体/节点等)的全局偏移,把每个变量贡献的“已知力”写入系统级向量 𝑓
-
BuildBiVector:按活跃约束的全局偏移,把每条约束的右端项写入系统级向量 𝑏
-
BuildDiVector(Dvector) :一次性得到系统 RHS 的拼接向量 𝑑={𝑓;−𝑏}(注意下半部分有负号),直接与 𝑍∗𝑦−𝑑 的实现对接。
-
BuildDiagonalVector:构造系统矩阵 𝑍 的“对角近似”向量,用于对角预条件或尺度化。
-
FromVariablesToVector: 从所有“活跃”变量中把它们当前的未知量状态收集起来,拼成系统级变量向量 𝑞,写进 mvector。
-
FromVectorToVariables: 把外部给出的系统级变量向量(长度应等于活跃自由度总数)散回每个变量对象的 State()。
-
FromConstraintsToVector and FromVectorToConstraints:对“约束乘子向量 𝑙”做收集/回填(gather/scatter)的两段工具函数,和上面写的一样。
-
FromUnknownsToVector and FromVectorToUnknowns: 整根未知量向量 ,q 和 l; 操作同上。
-
SchurComplementProduct:Schur 补矩阵的矩阵-向量乘, 完全matrix-free, 不显式组装 N。
-
SystemProduct: 按块结构“算子式”地计算整块KKT矩阵 𝑍与向量 𝑥的乘积。

- ConstraintsProject: 把“乘子向量”投影回可行集合。
- UnknownsProject : 同上
- WriteMatrixBlocks:把系统矩阵的各个“基本砖块”与 RHS 分别导出到磁盘。
- WriteMatrix: 显式装配法——直接调用装配函数得到稀疏矩阵 𝑍 和右端 rhs,写盘。
- WriteMatrixSpmv:算子(SPMV)重建法——不给出 𝑍,而是对每个标准基向量 𝑒𝑖 计算一次。
总结一下chrono的建模逻辑:
如果问的是“在建模阶段(BeginInsertion→EndInsertion)到底有没有把整块大矩阵 Z 真正组装出来?”
——答案是:没有。
在建模阶段只是把对象化的稀疏数据(变量、约束、K/R/M 块)登记到 ChSystemDescriptor 里,并给它们编号/写偏移。此时系统里保存的是:
- 每个变量块自己的 $M$、$M^{-1}$、已知项
Force(); - 每条约束自己的一行雅可比 $J_i$、右端 $b_i$、以及可选的对角 CFM(顺应)项 $E_{ii}$;
-
可选的
ChKRMBlock子块矩阵(刚度/阻尼等)。 这些都只是分散的小块/对象,不是整块 $Z$。偏移是在EndInsertion()后统一计算好的。K/R/M 块就是把变量侧“惯性-阻尼-刚度”这三件事打包成一类通用稀疏子块。 E 就是约束的“顺应/正则化矩阵”(compliance,也叫 CFM = Constraint Force Mixing)。
什么时候才“真的组装大矩阵 Z”?
只有在你明确调用组装相关接口或用直接线性求解器时,才会把整块
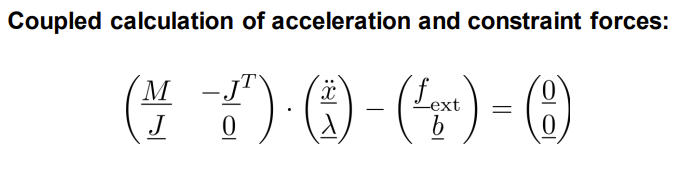
\[Z=\begin{bmatrix}H & J^{\top}\\ J & E\end{bmatrix},\quad \text{rhs}=\{f;\,-b\}\]显式贴到一个稀疏矩阵里。对应接口是 BuildSystemMatrix(&Z,&rhs),内部顺序就是:
PasteMassKRMMatrixInto(H) → PasteConstraintsJacobianMatrixInto(J) → PasteConstraintsJacobianMatrixTransposedInto(J^T) → PasteComplianceMatrixInto(E),然后 BuildDiVector(rhs) 生成 ${f;-b}$。
- 你在
WriteMatrix(...)里也能看到,它就是先调BuildSystemMatrix再写盘的:这说明显式装配是在需要时才做。 - 另外还有
WriteMatrixBlocks(...),是把 $H,J,E,f,b$ 分块导出(也不是整块 $Z$)。
迭代求解时并不需要显式 Z
- MINRES / 其它 Krylov:用
SystemProduct(result, x)做算子式乘法(SPMV)来代替显式 $Z$ 乘法;这就是“矩阵-向量乘不组装矩阵”的做法。WriteMatrixSpmv(...)甚至用“对每个单位向量做一次SystemProduct”按列重建 $Z$ 来做调试对比。 - PSOR / VI/CCP(乘子空间):用
SchurComplementProduct(result, l)直接算 $Nl=(J\,M^{-1}J^{\top}+E)l$,也不需要显式组装 $N$。
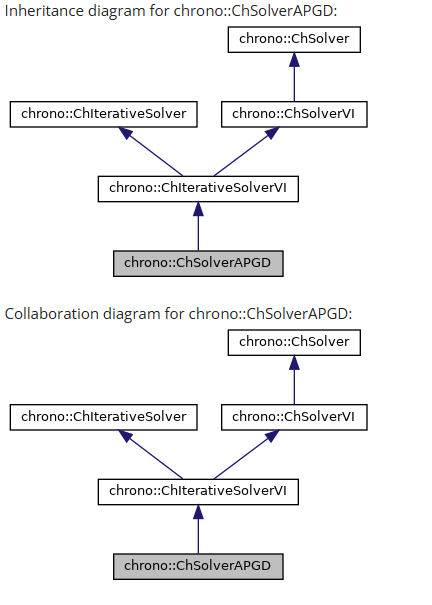
ChSolverAPGD: