WEEK 12(25.06.2025-01.08.2025)
考证:我查了下 APGD在处理大规模碰撞问题时比PGS快一个数量级 ,有可能是因为CCP摩擦你还木有加进去 或者其他人用了并行运算
情况说明:因为本周一和周二,个人出去玩请假两天,所以需要在周末补工作量,所以将周计划调整到周五到下周五
- 解决问题3个
- 1.为什么在迭代次数增加后反而会出现刚体弹飞的现象
- 2.为什么在加入摩擦力后,所有的碰撞算法是正常的,在没加入contact friction 的时候,第二个和第三个碰撞算法是不可行的。
- 3.求证是否可以微调参数,来增加实时性
- motor velocity的模型测试
- 关节内部的friction(另外三个)测试,不用作fix的
- spring damping 测试(优先级低)
- APGD算法部分的论文
- 证明算法更好(100刚体),想办法,出图,数据罗列等,去证明这个问题。
- CCP转化QP建模(可以后续去做)
2025.07.25
Task: 解决bug
BUG1 - 为什么在迭代次数增加后反而会出现刚体弹飞的现象?
测试模式: CDTest6.vme
现象如下列视频:
尝试打开warm-start在最后一个时刻崩飞,开和不开区别不大。
将两个求解器,Dantzig和APGD打上时间步长后,输出两个两个数据文件,进行可视化分析。
两种求解器热力图对比:
可视化结果如下:
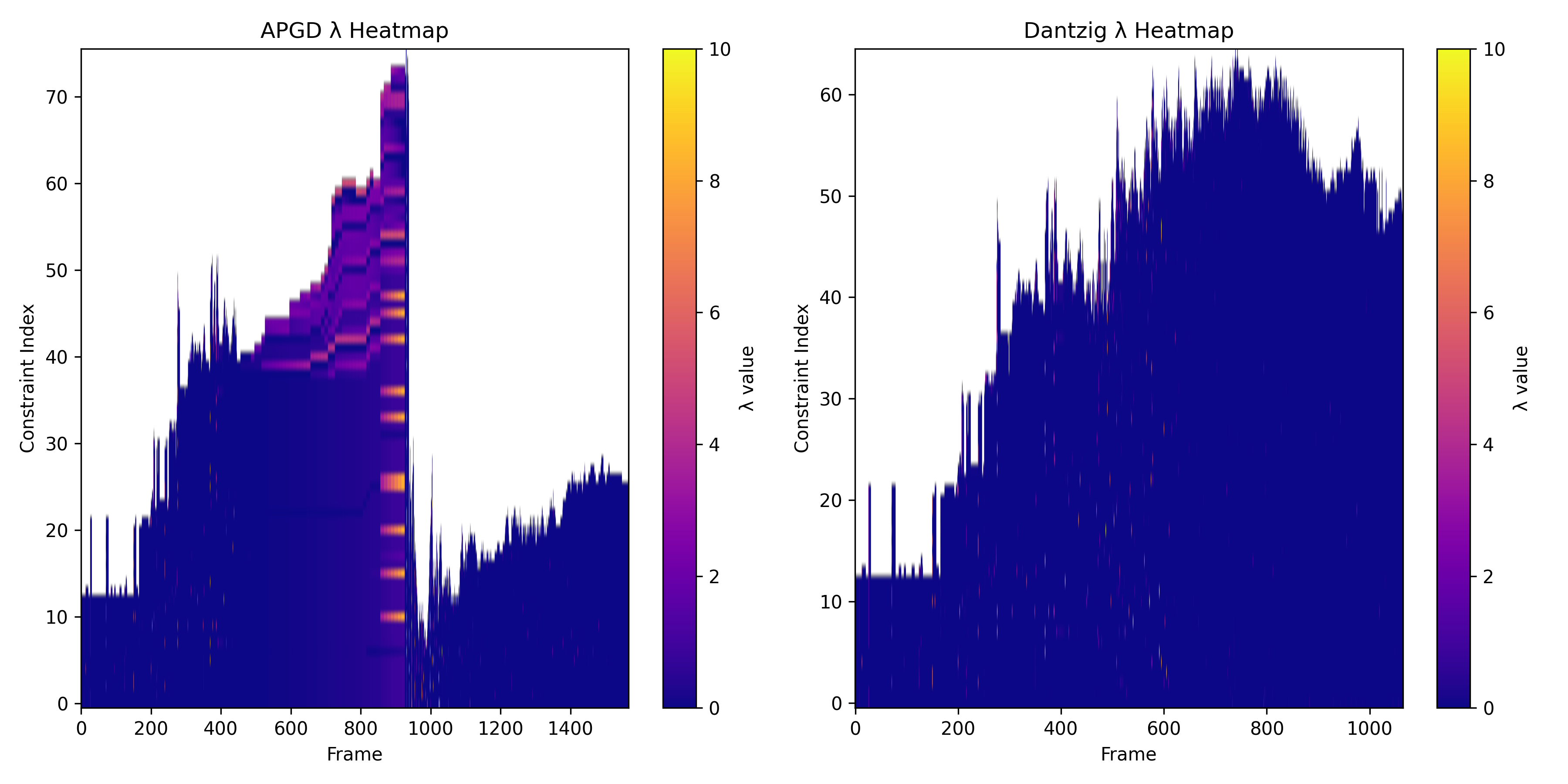
结果分析:
- 横轴:时间帧(仿真 step)
- 纵轴:λ 分量编号(即约束 index)
- 颜色亮度:λ 值大小,越亮表示反作用力越大
🔍 APGD λ Heatmap(左图)分析
特征1:第 600 ~ 900 帧,λ 逐步增强(横向阶梯)
- 对应约束编号:约 50 ~ 70
- 现象:出现了持续上升的阶梯状高 λ
-
可能原因:
- 刚体系统在这段时间发生了接触积累、约束饱和,λ 被“撑起来”
- 多个摩擦锥或者接触点 λ[i] 在逐帧累加发力(典型的投影震荡或刚性炸裂)
特征2:第 900 帧瞬间 λ 全黑 → 突然归零
- 说明此时 APGD 解出的 λ 突然全部接近 0,可能是发生了刚体脱落、求解器失败、或被强行 reset
-
你应该重点去看 第 900 帧 的:
- 解是否收敛?
- 刚体是否“飞走”了?
- 是否手动重置了系统状态?
特征3:第 800 帧某些 λ[i] 高亮(λ > 8)
- 明显看到几列接近亮白(颜色条上限是 10),说明这些 λ 非常大
- 高风险区域:λ[60] ~ λ[70],是 主要爆点
对800-1000帧进行分析:
APGD λ 向量中最活跃的分量(即变化最明显/值最大的分量)在第800到1000帧之间的趋势
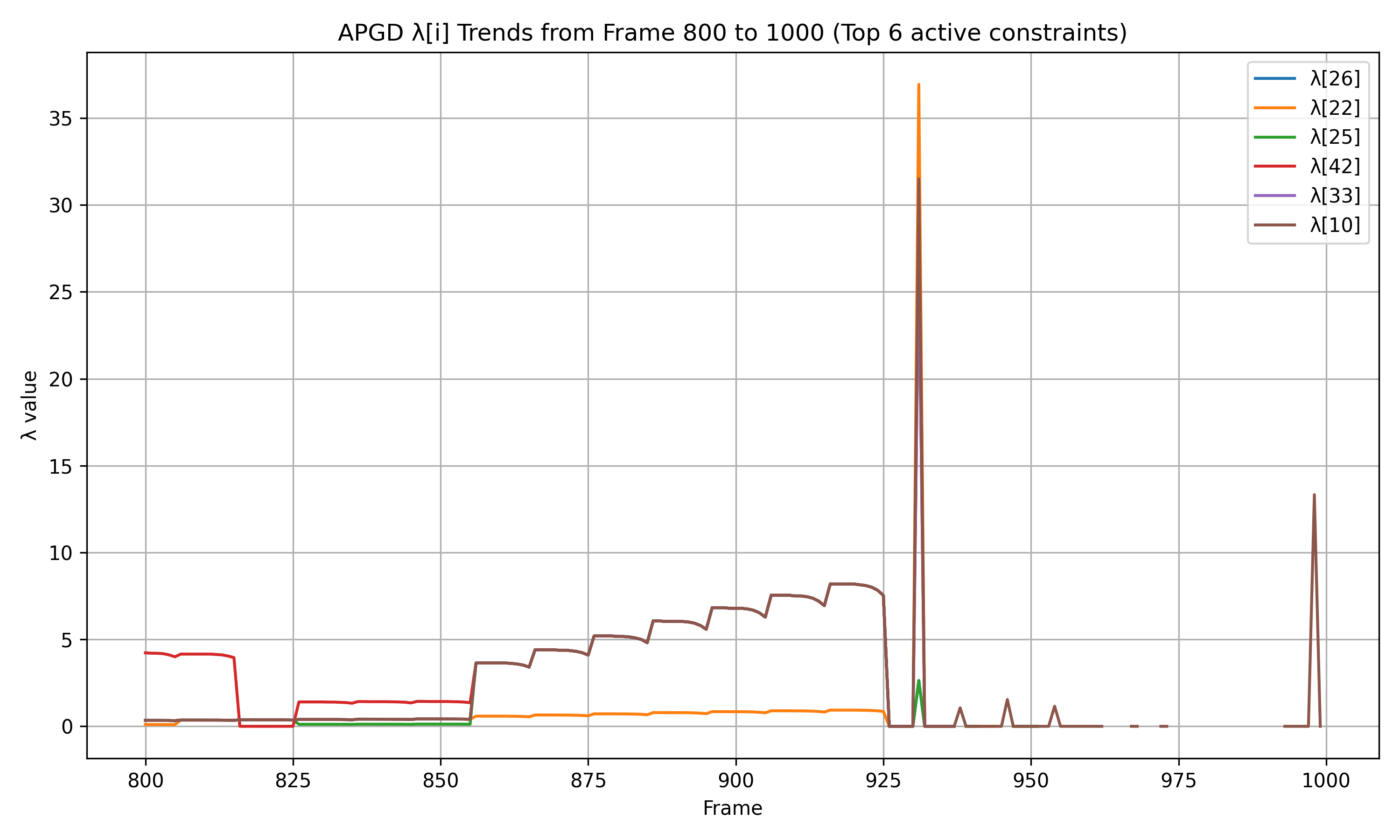
| λ[i] 分量 | 行为 | 关键帧 | 可能原因 |
|---|---|---|---|
| λ[22] | ⚠️ 在 第927帧 突然飙升至 约36,随后掉回0 | 帧927 | 投影失败 or 接触剧烈插入,系统瞬间冲击 |
| λ[10] | ⚠️ 从 帧850开始逐帧爬升,在 帧922急剧掉到0,之后仍断断续续出现 | 帧850~922 | 接触力逐步累积,帧922接触可能解除或系统崩溃 |
| λ[25] | 💥 帧927突刺(10以上),瞬时接触或摩擦冲击 | 帧927 | 接触碰撞瞬间高 λ |
| λ[42] | ⚠️ 帧800开始λ较高(约4),后逐渐下降、稳定 | 帧800~820 | 接触存在但被快速稳定吸收 |
| λ[33], λ[26] | 变化不大,仅有小幅波动,未导致异常 | / | 稳定约束分量 |
代码中是完成了,摩擦锥的建模的,所以应该不是没有摩擦锥建模而导致单一方向数值跑飞的这种情况。
OK!!!!!!!!!!!
BUG修复,原因如下:

在没有这段判断之前,你的 projectFriction 会 不分状况地 对所有块(block)做摩擦投影——即便此时 法向 λₙ 已经是 0 或负值(表示两刚体已经分离或者根本没接触),你仍然在切向上给它们“施加”摩擦缩放。这会带来两个恶果:
-
人为制造摩擦力 当
λₙ ≤ 0时,物理上根本没有接触,摩擦应当为零。但如果不跳过,你就会对切向 λ 做缩放投影,给出一个错误的非零摩擦力,反而把系统“拉”向错误的方向。 -
累积数值误差导致发散 这些非物理的摩擦力在 APGD 的投影-加速循环里被不断放大/叠加,最终演化成越来越大的 λ,直到把刚体“弹飞”。
加上
if (lambda_n <= 0.0)
continue;
后,你就 完全跳过了分离状态下的摩擦投影,保证只有在真正有接触(λₙ>0)时才施加摩擦锥约束。这样:
- 切向分量不会因“无接触”而被错误缩放,
- 也就不会产生那种离谱的摩擦冲量去破坏系统平衡,
- APGD 迭代中停止了这股“黑箱”错误扭曲力的注入,数值才恢复稳定,刚体不再弹飞。
所以,这个判断一加上,就根本切断了非物理摩擦生成的根源,Bug 自然被修复了。
BUG 2.为什么在加入摩擦力后,所有的碰撞算法是正常的,在没加入contact friction 的时候,第二个和第三个碰撞算法是不可行的。
也已经被解决
BUG3.求证是否可以微调参数,来增加实时性
先做简单尝试,在后期在作为工作做比对
- 对tol进行了调小,主要是速度从0.16 - 0.18 变化不大
- 加上warmstart,没变化,可能更慢
本问题之后求证
2025.07.26
Task: motor velocity的模型测试
- 什么是“motor velocity”功能?
在 VeroSIM 或类似物理引擎中,motor velocity constraint 一般指的是一种主动驱动型约束,用来指定某两个物体间的相对速度(而非被动地让它们自由运动或由碰撞决定)。
motor(电机、驱动器) 是一种主动控制的约束机制,它的核心作用是:
“不依赖力或碰撞等被动因素,而是明确规定某种相对运动行为(如速度、位置、力矩等)。”
在仿真中,motor 是什么?
Chrono 中的 “motor” 本质上是一个 约束(constraint)+ 控制函数(function) 的组合,通常用于:
| 类型 | 意图 | 典型表达方式 | 约束类型 |
|---|---|---|---|
| 速度 motor | 控制两个物体的相对速度为期望值 | $\dot{x}A - \dot{x}_B = v\text{target}(t)$ | LOCK 模式约束 |
| 位置 motor | 控制两个物体的相对位置变化 | $x_A - x_B = x_\text{target}(t)$ | LOCK 模式约束 |
| 力矩/力 motor | 施加一个控制力或力矩 | $f = f_\text{target}(t)$ | 直接加在刚体上,不是 constraint |
作用:为何在仿真中引入 motor?
- 驱动机械系统:例如电机带动转盘旋转、滑块直线运动。
- 测试力学响应:例如强迫一个物体做周期运动,观察系统反应(阻尼、共振等)。
- 模拟控制系统:与PID控制器等联动使用,做闭环仿真。
思路设计:对比可以正常的运行的dantzig进行实验,
dantzig中,他在代码实现中支持motor,虽然它没有显式写 motor 这个词,但通过对 LCP 矩阵 b 向量和上下界 lo, hi 的设计,就已经实现了 motor 功能。
关于这部分设计的详解:
你的 RBDLcpDantzig 实现中确实支持 motor(主动驱动约束),虽然它没有显式写 motor 这个词,但通过对 LCP 矩阵 b 向量和上下界 lo, hi 的设计,就已经实现了 motor 功能。
下面我详细给你指出:它是在哪里设计并支持 motor 的。
- motor 的本质 —— 非零 b 向量,LOCK 模式
在 Dantzig 求解器中,motor 被建模为:
- 一个普通的 LOCK 类型约束
- 并且该约束的右端项 $b_i = -v_{\text{target}}$(或位置误差)
- 对应的 lambda 没有正负限制(即上下界为 $-\infty, +\infty$)
- 在代码中,motor 的核心出现在这里:
b 向量的设定:
rowbx[PBX_B] = b[index];
这里 b[index] 是约束右端项,其意义就是约束项:
如果你在构造系统时设置了某个 motor 约束的 $b_i = -\omega_{\text{target}}$,就自动代表你希望当前约束强制系统满足该速度差(即 motor)。
myLo, myHi 控制 lambda 的上下限
在你调用:
dSolveLCP(..., myLo, myHi, ...)
这些上下限控制了每个约束的 Lagrange multiplier $\lambda_i$ 的取值范围:
- 如果约束是普通 LOCK motor,它允许 λ ∈ (−∞, +∞)(设置为 lo=−∞, hi=+∞)
- 如果是接触力,则 λ ≥ 0
- 如果是摩擦力,则 λ ∈ [−μλₙ, +μλₙ]
所以 是否是 motor,本质上是由 b 非零 + lo/hi 无限决定的。
你可以通过如下方式构造 motor:
constraint->SetMode(LOCK);
constraint->SetRightHandSide(-v_target); // motor velocity
constraint->SetLagrangeLimit(-1e20, 1e20); // no bounds on lambda
在你这套系统中应该是在系统组装阶段将这些 b、lo、hi 传入 RBDLcpDantzig::setHighVector, setLowVector, b[] 等。
补充:怎么验证某个约束是不是 motor?
在组装阶段打印每个约束项:
for (int i = 0; i < size(); ++i) {
std::cout << "Constraint " << i
<< " b_i=" << b[i]
<< " lo=" << myLo[i]
<< " hi=" << myHi[i] << std::endl;
}
- 如果 b ≠ 0 且 lo = -∞,hi = +∞ → 就是 motor。
- 如果 b = 0 且 lo = 0,hi = ∞ → 就是接触。
- 如果 b = 0 且 lo, hi = ±μλₙ → 就是摩擦。
2025.07.29
Task: 在APGD中实现motor,并测试velo,测试关节
主要是在RBDClusterLagrangeMultipliers.cpp中,motor 是通过 addEqualityConstraintsToSystem() 添加进来的!
int number = constraintRes->addEqualityConstraintsToSystem(
J,
constraintsRightSide,
delta_t,
currentRow);
Dantzig 和 APGD 都是基于 同一份建模代码 RBDClusterLagrangeMultipliers,看上去输入完全一样,但 motor 在 Dantzig 中生效,在 APGD 中却“没效果”。
不是建模问题,而是求解器行为不同导致的 motor 不起作用!
motor 在 APGD 中不起作用,是因为 APGD 对 “无界约束” 的处理与 Dantzig 不一样: 如果约束的 lambda 没有上下界,APGD 会忽略它们,不把它当作 LCP 求解的问题!
✅ 确实设置了上下界:
for (int i = 0; i < size; ++i) {
myLo[i] = -1e10;
myHi[i] = +1e10;
}
这在你构造 APGD(RBDLcpAPGD)时看似已经设置好了 motor 的上下界。
❗但为什么 APGD 还是不支持 motor?
这段代码虽然写了上下界,但:
🚫 它可能在 motor 实际加入 lambdaLow / lambdaHigh 的过程中 被覆盖了!
看你真实建模流程:
在 RBDClusterLagrangeMultipliers::doTimeStep() 中,真正设置上下界的是:
myLcp->setLowVector(lambdaLow);
myLcp->setHighVector(lambdaHigh);
而这两个变量 lambdaLow, lambdaHigh 是在这个函数里构建的:
VSM::VectorNDynamic lambdaLow(-VSM::maxDouble);
VSM::VectorNDynamic lambdaHigh(VSM::maxDouble);
这意味着:
⚠️ 你前面构造的 myLo = -1e10 其实被 lambdaLow = -1e308 覆盖了!!
而 -VSM::maxDouble ≈ -1e308,对于 APGD 而言就是 无边界,projection 不生效。
✅ 解决方案:在 doTimeStep() 中,把 motor 的上下界从 ±1e308 改为 ±1e6
你可以在构建 lambdaLow, lambdaHigh 后这样处理 motor:
// 在处理 motor 的时候
lambdaLow[i] = -1e6;
lambdaHigh[i] = +1e6;
这一步必须在 真正 push 到 lambdaLow / lambdaHigh 的时候执行!
不动建模层(即不修改
lambdaLow/lambdaHigh的生成方式),而仅在 APGD 启用时对其做“兼容性修复”,使得 motor(等式约束、无上下界)在 APGD 中能生效,但 Dantzig 等其他求解器照常运行。
解决方案:只在 APGD 启用时修正 motor 的上下界
你可以在 设置 lambdaLow, lambdaHigh 到 myLcp 之前,加上一段 patch 代码。
在 RBDClusterLagrangeMultipliers::doTimeStep() 中找到这段:
myLcp->setLowVector(lambdaLow);
myLcp->setHighVector(lambdaHigh);
就在这之前,加上以下代码段:
// --- Only patch for APGD: Fix unbounded constraints (e.g., motors) ---
if (dynamic_cast<RBDLcpAPGD*>(myLcp)) {
const double kMotorClamp = 1e6;
for (int i = 0; i < lambdaLow.size(); ++i) {
// 检查是否是“无边界”约束(motor、LOCK类型常见)
if (lambdaLow[i] < -1e308 && lambdaHigh[i] > 1e308) {
lambdaLow[i] = -kMotorClamp;
lambdaHigh[i] = +kMotorClamp;
}
}
}
工作原理说明:
dynamic_cast<RBDLcpAPGD*>:确保只对 APGD 起作用。- 检查:
lambdaLow[i] < -1e308 && lambdaHigh[i] > 1e308→ 表示这行 λ 是“无边界”,典型是 motor。 - 替换成:
[-1e6, +1e6]→ APGD 可以做投影。
好处:
| 优点 | 说明 |
|---|---|
| 不修改建模层 | 所有其他求解器(Dantzig、GS)行为完全不变 |
| 针对 APGD | 只影响 APGD,其他求解器仍可处理无界约束 |
| motor 生效 | motor 的目标速度/位置开始影响系统了 |
依旧这样:
我不进行任何边界的更改,只增加100迭代到500迭代,仿真速度很慢,但是效果正常。如下:

!这里对实时性先不做要求,只做基础功能测试
因为 APGD 是一种渐进迭代法,当迭代次数不足时,它无法充分计算出满足系统约束(如 motor、碰撞、关节等)的拉格朗日乘子(λ),系统就没有足够的“约束力”来拉住或维持结构,表现为物体穿透、摆杆断开、约束失效;迭代越多,λ 趋近正确,仿真才趋于物理正确。
测试motor velocity的模型: 03_Motor_VelocityBased_Hinge
迭代次数:500
测试motor velocity的模型: 04_Motor_VelocityBased_Prismatic
迭代次数:500
测试无误。
- 关节内部的friction(另外三个)测试,不用作fix的
- 01_Friction_Hinge 正常 迭代500次
- 02_Friction_Prismatic 正常
-
03_Friction_BallInSocket 正常
- spring damping 测试(优先级低)
Spring damping(弹簧阻尼) 是指一个系统中既包含弹性力(Spring Force),又包含阻尼力(Damping Force)的模型,用于模拟物体间的弹性连接和能量耗散行为。
效果:
2025.07.30
TASK:APGD部分,论文初稿
1.APGD算法
2025.08.01
研究具体的建模CCP