WEEK 14(11.08.2025-15.08.2025)
- 1.LCP → QP (多体系统LCP模型转换为QP的严格性分析)
- 继续步长问题
- 对比一些chrono看看是不是少东西(漏了某些特性)
2025.08.11
Task: LCP -> QP
- 关于LCP和QP问题的转化是否是近似的?
详细回答了这个问题。
2025.08.12
Task: 步长问题
在探讨步长问题时,我在思考 外部时间步 ℎ(物理/积分层)来自RBDClusterLagrangeMultipliers 及上层, 和APGD求解器中的步长更新是否是一个值,内部是指的迭代步长。
我现在去重新理解伪代码,从而来解决这个问题:
两个“步长”其实是两个不同层面的概念,一个是外部仿真时间步长,一个是APGD 算法内部的迭代步长
- 外部时间步长(simulation time step, Δt)
- 由你的物理系统或仿真主循环控制,比如 RBDClusterLagrangeMultipliers 上层代码设置的
h = 0.001s。 - 这个 Δt 决定了 一次物理积分要前进多少真实时间。
- 在每一个 Δt 内,求解器(APGD、Dantzig 等)会被调用一次,用来解这一步的约束方程。
- 它不会随着 APGD 的迭代改变,是固定的外部参数。
- 内部迭代步长(APGD 的梯度步长,t 或 tk)
-
是 APGD 算法内部用来更新解向量 $\lambda$ 的“学习率”。
-
计算方式通常是:
\[t_k = \frac{1}{L_k}\]其中 $L_k$ 是 Lipschitz 常数的估计值(梯度变化的“斜率”上界)。
-
在你的实现里,可能会有:
Lk = 0.9 * L_temp; tk = 1.0 / Lk;这个 tk 是 每一次迭代用来控制更新幅度的参数。
-
它是数值优化里的步长(step size in optimization),与外部 Δt 没有直接耦合,但 Δt 越大,梯度值会变大,可能间接影响到 Lk 的估计。
- 它们的关系
- 外部 Δt 决定物理系统积分的稳定性和精度。
- 内部 tk 决定 APGD 每次迭代更新的快慢。
- 外部 Δt 变大 → 系统矩阵 Z、右端项 b 会变化 → 梯度的 Lipschitz 常数 Lk 可能变大 → 内部 tk 变小。
- 两个步长不直接等价,但是外部 Δt 会通过物理方程影响到内部 tk 的取值范围。
📌 直观类比
- 外部 Δt:你开车时每秒看一次地图(仿真采样频率)。
- 内部 tk:你每次修正方向盘的力度(算法迭代更新幅度)。
- 看得太慢(Δt 太大)会让方向修正困难,需要更小的转向幅度(tk 更小)才能不翻车。
这段迭代的目的,就是在一次物理时间步内,通过多轮更新和步长调整,让 APGD 收敛到一个稳定、可行、下降充分的解,确保数值稳定性和收敛速度。
关于步长问题总结
外部也就是我们在UI界面设置,RBDscene中传进来的外部时间步长,是固定的,而内部时间步长和这个完全不一样。
- 外部时间步长:仿真每一步推进的物理时间长度。
- 内部时间步长:在同一 Δt 内不断调整 λ,用步长 tk 控制每次走多远,直到找到收敛解。
也就是每个外部的时间步长,我都需要从头去计算一次最优解,而内部时间步长的意义是为了不断调节每步的大小,更快, 更准的找到最优解。
2025.08.13
task:测试chrono demo 用来验证步长是否发生了变化
实验详解:
Chrono 小实验总结:APGD 求解器在接触场景中的表现
- 实验目的
- 验证在 Chrono 框架中使用 APGD(Accelerated Projected Gradient Descent) 作为接触求解器的运行情况。
- 理解外部时间步长(
time_step)与 APGD 内部数学步长(t_k)的区别。 - 检查
L_k(Lipschitz 常数)和t_k在实际仿真中的变化规律。
- 场景搭建
- 使用 NSC(Non-Smooth Contact) 接触模型。
- 切换求解器为
ChSolver::Type::APGD,最大迭代次数设为 100。 -
场景元素:
- 圆柱体:质量 1500 kg,半径 0.5 m,高度 0.8 m,从高度 2.65 m 自由下落。
- 地面:固定刚体,尺寸 2×1×2 m。
- 碰撞系统:
MULTICORE+HYBRID窄相算法。 - 可视化:Irrlicht 渲染,实时显示接触力。
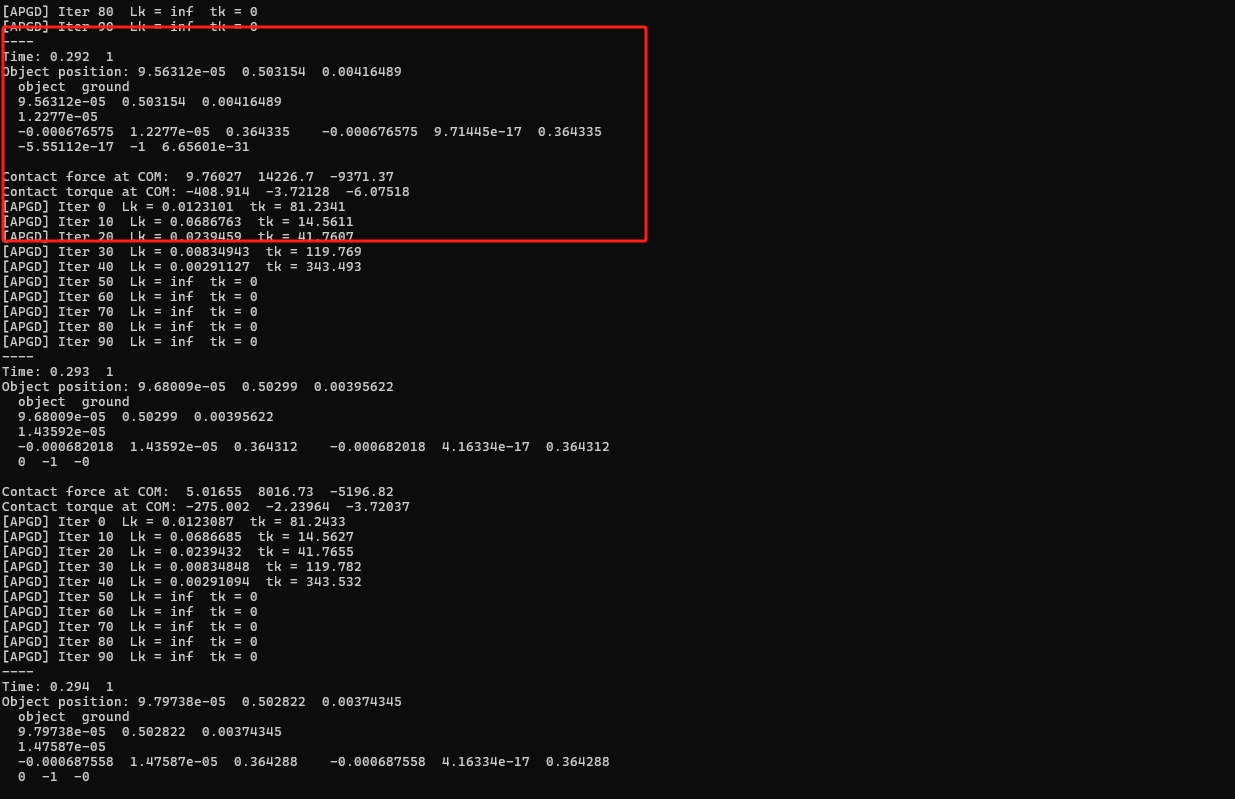
- 关键观测
接触未发生时
sys->GetNumContacts() = 0- APGD 内部
nc = CountActiveConstraints()为 0 -
初始化 Lk 时:
\[L = \frac{\| N (\gamma - \hat{\gamma}) \|}{\|\gamma - \hat{\gamma}\|}\]因分母为 0 →
Lk = inf,t_k = 0 -
打印结果恒为:
Lk = inf tk = 0
接触发生后
nc > 0时,才会计算出有效的 Lk 和 tk。- 如果打印逻辑没有加
nc检查,就会在无约束时也输出无效值。
外部步长 vs 内部步长
- 外部时间步长:
time_step = 1e-3s(积分推进量)。 - 内部步长:APGD 的
t_k,由 1/Lk 决定,是数学迭代参数,与物理时间步长无关。
最终效果图:
2025.08.14
task: chrono src
2025.08.15
task:右端项 𝑟(即 Chrono 的 𝑏schur)的构造
改了一天,改崩了,现在还原版本,周一在继续尝试。