chrono中multicore的并行化设计
1. 集中式DataManager + SoA 大数组
在整个并行化流程中,核心思想就是这个DataManager数据管理系统。
他的工作:它管“全局状态 + 稀疏大数组”。
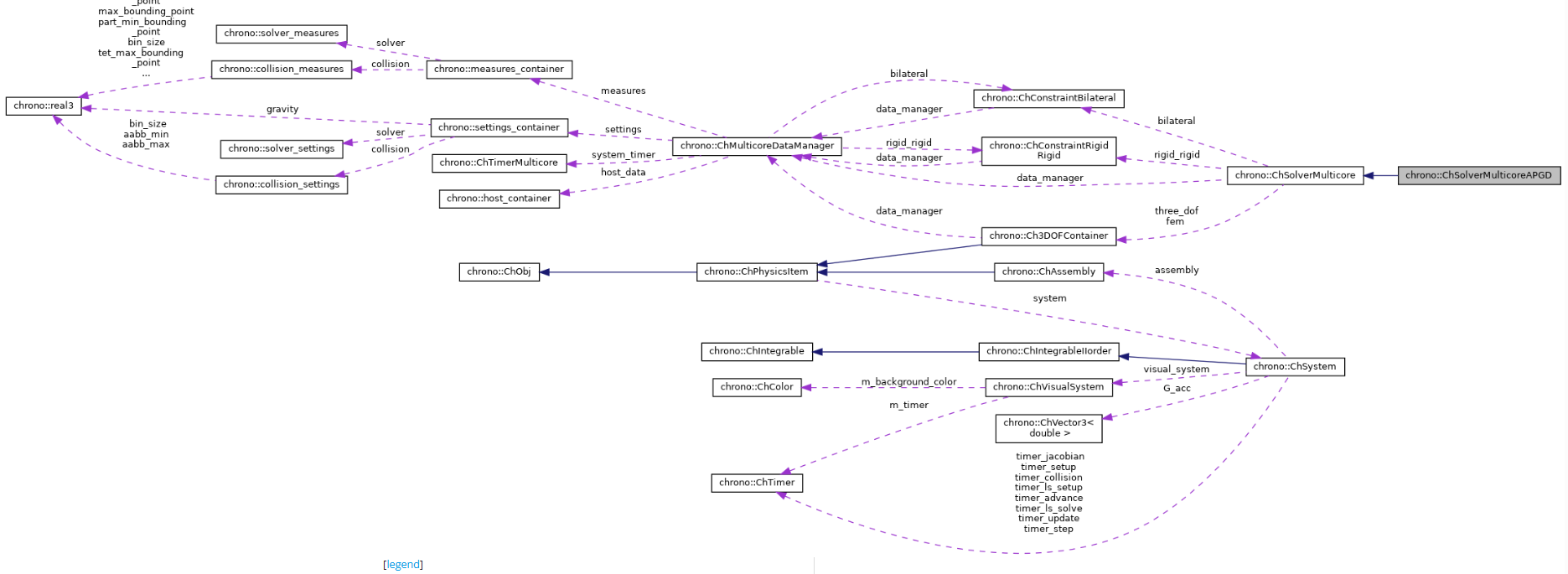
ChMulticoreDataManager 是 多核后端的总控/数据枢纽 :
- 把碰撞检测、求解器、物理对象状态需要的所有大块数据,集中放在一个「结构化的数组仓库」里(host_container host_data);
- 再提供一些尺寸信息(num_* 族)、计时器/配置/统计、以及材质混配策略等。
Tips : 一切跨模块共享的数据(刚体/粒子状态、接触、稀疏矩阵 D/D_T/M/M_inv/M_invD、右端向量 v/hf/gamma/E 等)。
核心成员是 host_container,它是“结构化数组(SoA)”——为了并行和缓存友好,每一类量都放成一大块线性数组,而不是面向对象的分散指针。
SOA
在这里补充一下什么是SOA,和SOA的作用:
SoA(Structure of Arrays,数组的结构)是一种内存布局,把“同一字段”的数据按连续的大数组存放;与之相对的是 AoS(Array of Structures,结构体的数组),把每个对象的所有字段打包成一个结构体,再把很多结构体连成数组。
- AoS 示例(每个刚体一条记录,字段挨在一起)
struct RigidBody { real3 pos; quaternion rot; real3 vel; real mass; /* ... */ }; std::vector<RigidBody> bodies; // bodies[i] 就是第 i 个刚体的“整包”数据 - SoA 示例(每个字段一大块数组)
struct HostContainer { custom_vector<real3> pos_rigid; custom_vector<quaternion> rot_rigid; custom_vector<real3> vel_rigid; custom_vector<real> mass_rigid; /* ... 其它字段 ... */ } host; // 第 i 个刚体的位置是 host.pos_rigid[i],姿态是 host.rot_rigid[i] …pos_rigid / rot_rigid / ct_force / ct_torque / gamma / E / D / D_T … 都是大而连续的“字段数组”,这就是标准的 SoA
SoA 的核心作用(为什么仿真里爱用它)?
-
缓存/预取友好
大多数数值核是“对一个字段做同构遍历”(例如对全部速度做一次更新、对全部法向冲量做投影)。
- SoA 让这类循环顺序扫描一大片连续内存,L1/L2 命中率高,CPU 预取能跟上。
- AoS 在这种循环中会“跨字段跳跃”,把无关字段也拖进缓存,浪费带宽。
- SIMD / SIMT/ GPU 合并访问
- 向量化/AVX 需要连续数据;GPU 需要 coalesced(合并)访问。
- SoA 把同一字段排成大块,线程束/向量寄存器能一次抓到 N 个元素;AoS 则会被“结构体步长”打散。
- …剩余的好处在这里不做展开了,之后看到在进行补充。
host_container:每块数据是做什么的?
1) 接触相关(NSC/SMC 双路线的共享与区分) 2) 物体/自由度 3) 约束类型与映射 4) 稀疏矩阵与动态向量(Blaze)
ChMulticoreDataManager/host_container = 多核 NSC/SMC 的“数据中台”。
2. 稀疏算子化的 Schur 乘
“Blaze”就是一个高性能的 C++ 线性代数库。(可能和VSM 数学库相似,但是有待考察)。
这个问题之前就说过,在提上日程的过程中,主要是算子化,可以减小缓存,也可以为之后并行化做好准备。
这部分在笔记chrono求解器部分的结构有所提到过,核心思想 如下:
chrono中的建模阶段是通过对不同块的矩阵进行偏移,也就是编码,然后不组装大矩阵Z,看求解器需要不,如果是直接线性求解器,类比VEROSIM中的dantzig,那么我就按照编号把大矩阵组装好,然后进行线性的求解,但是对于APGD这种迭代的求解器暂时不需要大矩阵,那么他在APGD调用相关数据时,比如N和R时,就可以根据偏移编码,读取出数据,从而进行计算,怎么编写的目的是为“既能装配、也能算子式”的通用接口层,方便不同类型求解器插拔。
Multicore 只是在 SoA 数据布局上把这套算子化思路进一步做了“视图化/批处理化”。
这里的“视图化”(views)指的是:不复制数据,而是用“切片视图”去引用SoA大数组里的一个连续(或规则)片段,并把这个片段当成“像独立矩阵/向量一样”的对象来操作。
读写都直接作用在原数组上 + 上层拿“窗口”来用(宏定义) + 底层仍是一份大数组
优点:
-
零拷贝 + 批处理 : 把“成千上万个约束里所有的切向分量”一次性拿出来当成一个大 Submatrix/Subvector,一次循环就能做完“投影/缩放/加权”等批量操作。无需把每个约束挨个取字段、拼小数组。
-
语义清晰(宏定义): 提供了移植代码的思路 , 逻辑上你就写“对 T 块做摩擦盒投影,对 N 块做非负投影,对 B 块跳过投影”。代码层面体现为对 DT、DN、EB 这样的“窗口对象”做运算,物理块和代码块一一对应。
-
缓存/并行友好: 视图让你顺序地扫一整个物理块(SoA 连续内存),避免在 AoS 里“跨字段跳来跳去”。OpenMP 只要包一层 #pragma omp parallel for 就能把块内循环并起来。
3. OpenMP 数据并行 + 线程自适应
-
大头循环(清力、收集/回散状态、粒子重映射、接触建图/回填等)用 #pragma omp parallel for 做数据并行;线程数由系统侧集中管理,并提供计时窗口 + 试探/回退的动态调优(例如每 10~50 帧评估一次)。
-
并行的“计算密集内核”多在装配/碰撞/数据层;迭代内部未强绑 OMP,便于替换不同算法(PGS/BB/CG/APGD…)。
4. 模块边界清晰(碰撞 ↔ 物理 ↔ 求解器)
碰撞系统在 PreProcess() 把内部 cd_data 的指针直接指向 DataManager 的外部状态数组(避免复制),Run() 后 PostProcess() 把接触/材料信息回填,再交给求解器(NSC/SMC 任选)。
关于这部分我找到了相关的文献,有待查看。
CHRONO: a parallel multi-physics library for rigid-body, flexible-body, and fluid dynamics
ChSolverMulticoreAPGD.cpp:
代码移植的可行性分析
- 数据层(SoA & DataManager): 把“分散在对象/容器里的状态与接触数据”下沉为一套集中式 SoA 大数组,并建立与 UI/对象世界的双向映射。
- 碰撞系统对接
- 约束装配(稀疏 + 视图宏)
- 求解器并行(APGD/PGS/SIPGS 等)
- 积分器 (其中每部分都要做,稳定性测试和线程调试)
下面这部分来源于cursorm,考虑删除
并行总体架构(Multicore 模块)
- 数据核心(DataManager):
ChMulticoreDataManager持有所有跨模块共享的数据数组(状态、接触、稀疏矩阵、右端项等),并集中管理定时器、设置项与统计信息。求解器、碰撞系统、系统装配均通过它共享数据,避免频繁传参与复制。- 时间步流水线:
ChSystemMulticore::AdvanceDynamics()驱动一次完整时间步:
Setup():缓存步长与容差、统计 DoF、刷新活跃体计数。Update():按严格次序装配(清力→约束加载→刚体/轴/马达/3DOF 更新→注入约束→收集双边约束映射)。collision_system->PreProcess/Run/PostProcess/ReportContacts():连接到 DataManager 的外部状态数组,运行宽/窄相,回填测量与接触材料合成输入。solver->RunTimeStep():调用多核迭代求解器(NSC/SMC 变体)处理法向/切向/自旋与双边约束的 Schur 系统。- 收敛后并行回散速度、位置到实体,再推进
ch_time,可选动态线程调优。- 并行范式: 以 OpenMP 为主,通过
#pragma omp parallel for在多处对大数组(刚体/粒子/接触)进行数据并行;线程数集中由omp_set_num_threads管理,并提供基于计时器的动态调优。未见 TBB/线程池/显式std::thread在该子模块中使用。
关键并行位置与职责
- 系统更新与回散(scatter)
- 并行更新并回散刚体速度/姿态,刷新碰撞同步位姿。
#pragma omp parallel for for (int i = 0; i < assembly.bodylist.size(); i++) { if (data_manager->host_data.active_rigid[i] != 0) { auto& body = assembly.bodylist[i]; body->Variables().State()(0) = velocities[i * 6 + 0]; // ... body->VariablesQbIncrementPosition(this->GetStep()); body->VariablesQbSetSpeed(this->GetStep()); body->Update(ch_time, true); // update the position and rotation vectors pos_pointer[i] = (real3(body->GetPos().x(), body->GetPos().y(), body->GetPos().z())); rot_pointer[i] = (quaternion(body->GetRot().e0(), body->GetRot().e1(), body->GetRot().e2(), body->GetRot().e3())); } } - 并行清零所有变量的力向量。
#pragma omp parallel for for (int i = 0; i < (signed)data_manager->num_rigid_bodies; i++) { assembly.bodylist[i]->VariablesFbReset(); } // ... for (int i = 0; i < (signed)data_manager->num_rotmotors; i++) { rotmotorlist[i]->VariablesFbReset(); } - 并行装配刚体状态与力,并同步碰撞模型位姿。
#pragma omp parallel for for (int i = 0; i < assembly.bodylist.size(); i++) { auto& body = assembly.bodylist[i]; body->Update(ch_time, false); body->VariablesFbLoadForces(GetStep()); body->VariablesQbLoadSpeed(); // scatter qb/hf/pos/rot/active/collide 到全局数组 // ... if (body->GetCollisionModel()) body->GetCollisionModel()->SyncPosition(); }
- 并行更新并回散刚体速度/姿态,刷新碰撞同步位姿。
- 碰撞系统(Multicore 自定义)
- 预处理阶段将
cd_data指向 DataManager 的“外部状态数组”,避免复制。void ChCollisionSystemChronoMulticore::PreProcess() { // Set pointers to state arrays cd_data->state_data.pos_rigid = &data_manager->host_data.pos_rigid; // ... // Update collision detection settings const auto& settings = data_manager->settings.collision; // ... } - 碰撞后处理时,按粒子数量并行回填排序速度并写回系统速度向量(粒子三自 3 DoF 对齐)。
#pragma omp parallel for for (int i = 0; i < (signed)data_manager->num_particles; i++) { int index = cd_data->particle_indices_3dof[i]; data_manager->host_data.sorted_vel_3dof[i] = data_manager->host_data.vel_3dof[index]; v[body_offset + i * 3 + 0] = data_manager->host_data.vel_3dof[index].x; v[body_offset + i * 3 + 1] = data_manager->host_data.vel_3dof[index].y; v[body_offset + i * 3 + 2] = data_manager->host_data.vel_3dof[index].z; } - 并行将每个接触对映射到接触容器(用于材料合成/接触加载)。
#pragma omp parallel for for (int i = 0; i < (signed)num_contacts; i++) { auto b1 = bids[i].x; auto b2 = bids[i].y; auto s1 = int(sids[i] >> 32); auto s2 = int(sids[i] & 0xffffffff); container_mc->AddContact(i, b1, s1, b2, s2); }
- 预处理阶段将
- 求解器层(Schur-Product + 投影)
- 求解器基类与多种算法(APGD/BB/MinRes/CG/Jacobi/GS)通过函数子
ChSchurProduct、ChProjectConstraints解耦“矩阵-向量乘”和“锥投影”。具体迭代内部未直接出现 OMP 指令,多线程主要来自装配/碰撞/数据级并行;求解器调用的是 Blaze 稀疏结构,计算密集部分走 Schur-Product 回调。class CH_MULTICORE_API ChSolverMulticore { // Solve(...) 接受 ChSchurProduct 与 ChProjectConstraints,迭代在各子类实现 }; class CH_MULTICORE_API ChSchurProduct { /* 负责 AX */ }; class CH_MULTICORE_API ChProjectConstraints { /* 负责投影 */ };
- 求解器基类与多种算法(APGD/BB/MinRes/CG/Jacobi/GS)通过函数子
线程数管理与动态调优
- 设置接口:
ChSystemMulticore::SetNumThreads使用omp_get_num_procs()做上限提示,并集中omp_set_num_threads(num_threads_chrono),同时将 Eigen 线程数对齐传入基类接口(为稀疏直解器等准备)。int max_avail_threads = omp_get_num_procs(); if (num_threads_chrono > max_avail_threads) { std::cout << "WARNING! Requested number of threads (" << num_threads_chrono << ") "; std::cout << "larger than maximum available (" << max_avail_threads << ")" << std::endl; } omp_set_num_threads(num_threads_chrono); - 运行时线程调优(可选): 基于最近 10 帧/50 帧
step计时窗口做“试探+回退”的线程数调整,每次尝试 ±2 线程;确保在[min_threads, max_threads]内。if (frame_threads == 50 && detect_optimal_threads == false) { // 提升 2 线程并记录基线 current_threads += 2; omp_set_num_threads(current_threads); } else if (frame_threads == 10 && detect_optimal_threads) { // 比较新窗口耗时,若变差则回退 if (old_timer < current_timer) { current_threads -= 2; omp_set_num_threads(current_threads); } } if (current_threads < data_manager->settings.min_threads) { current_threads = data_manager->settings.min_threads; omp_set_num_threads(data_manager->settings.min_threads); }
数据流与矩阵装配(对并行的支撑)
- 使用 Blaze 的
CompressedMatrix/DynamicVector存储D,D_T,M,M_inv,M_invD与向量v,hf,gamma,E,并通过大量宏定义快速获取子块/子向量视图,减少临时对象与拷贝,便于在求解器/装配阶段进行高效批量访问。#define _D_ data_manager->host_data.D #define _M_invD_ data_manager->host_data.M_invD #define _D_T_ data_manager->host_data.D_T // ... 大量 submatrix/subvector 宏,按接触与双边区段进行切片视图
你需要知道的并行边界
- 碰撞检测(宽/窄相)与接触映射是数据并行热点;3-DoF 粒子的排序/拷贝也以 OMP 并行方式批处理。
- 刚体/轴/马达/粒子更新、力装配、状态回散均使用 OMP 并行循环。
- 迭代求解器的并行化主要通过“装配好的稀疏结构 + 回调”的方式间接受益,未见显式每步 OMP;真正的线程数控制集中在系统侧。
- 未使用 TBB/线程池;GPU/CUDA 不在该
chrono_multicore子模块直接介入(GPU 有独立子模块)。
简短结论
- 核心思想:以 DataManager 为中心的 SoA 数据布局 + OpenMP 数据并行(遍历大数组)+ 运行时线程数调优;碰撞系统与物理装配共享外部状态数组,避免复制;求解器以函数子抽象 Schur 乘与锥投影,复用稀疏视图高效访问。
-
并行收益点:刚体/粒子批处理、接触生成与材料预处理、状态回散、部分碰撞后数据重映射;线程数可自调以逼近平台最优。
- 以上并行相关关键位置均已在代码引用中标注。
小结
- DataManager 聚合数据与设置,贯穿装配-碰撞-求解。
- OpenMP 并行覆盖清力、刚体/粒子更新、接触映射、粒子速度重映射与回散。
- 线程控制集中在
ChSystemMulticore,支持基于计时的动态调优。 - 求解器通过 SchurProduct/Projector 抽象,配合 Blaze 稀疏结构进行高效迭代。